
So today I got to breathe unhealthy air at work for 5 hours straight which made me totally beat, so not much progress tonight..
Still I managed to get some work done.
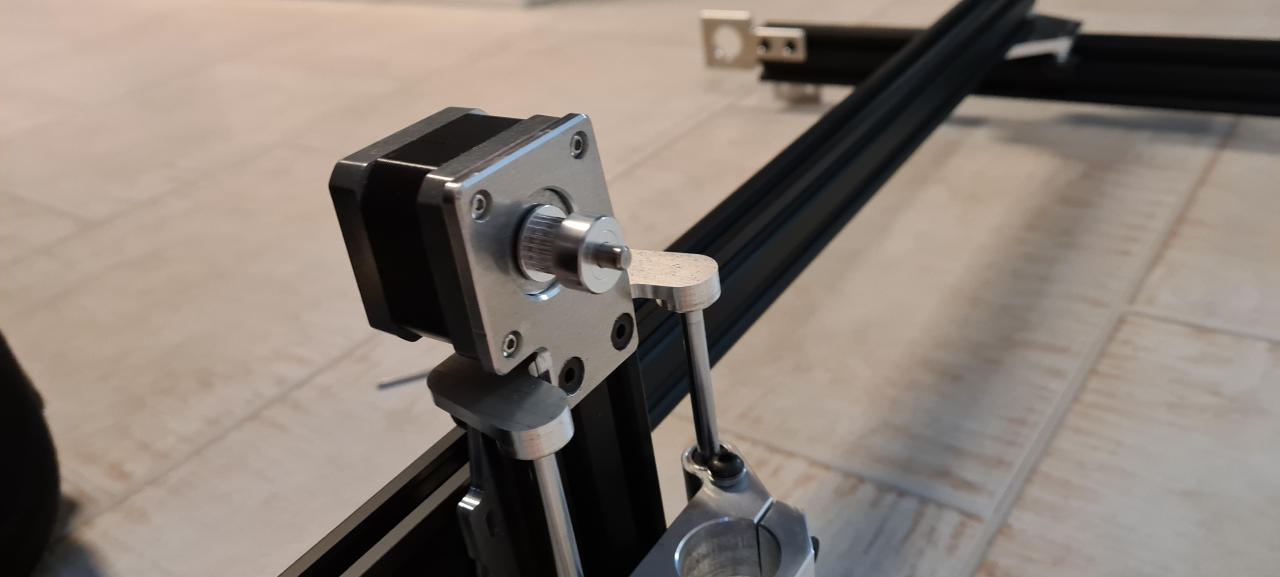
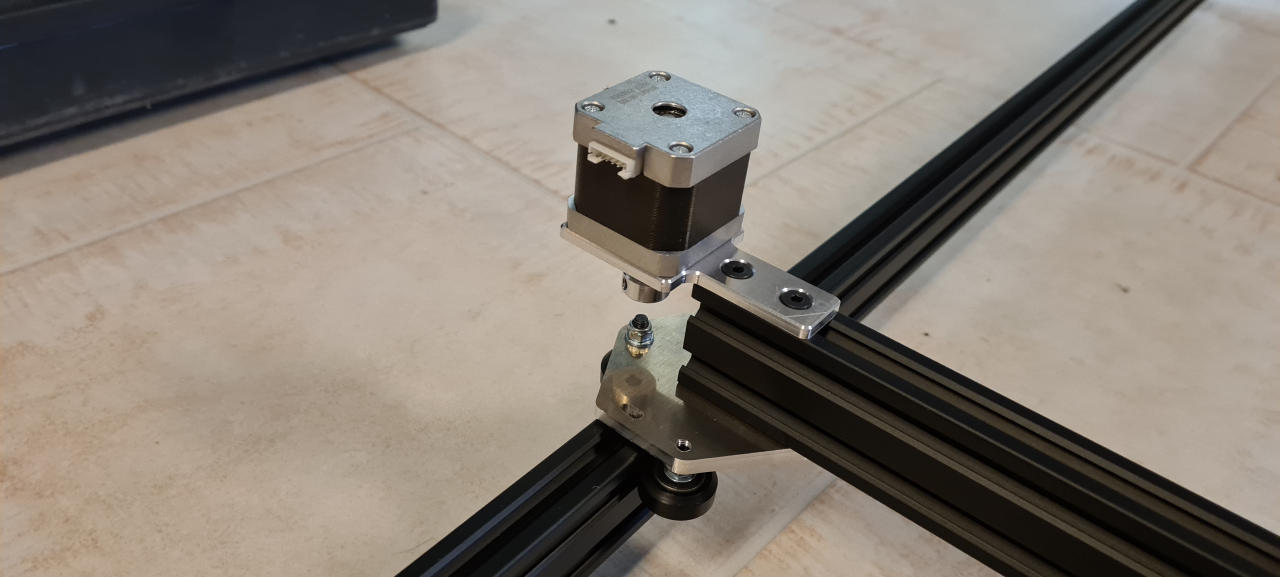
I mounted all the steppers but realised that I don’t have enough pulleys to complete the plasma at home.. Put in an emergency order yesterday for some nuts and belts but totally neglected the pulleys.. So I’ll either have to wait to get proper pulleys or I’ll exchange the Y steppers for some NEMA24 steppers that I have pulleys for.. I’ll decide tomorrow, so we’ll see.. Since I didn’t even have matching NEMA17 steppers for the Y-axis I’ll probably cut new mounts from 6mm aluminium and mount the NEMA24:s.. The Y steppers needs to pull the most weight of them all so..

While not making so much on the mechanical side of things, which is almost finished by the way, I started on the electronics. This is a Raspberry Pi 3b+ that’ll run KlipperOS with Mainsail as a frontend. It’ll push instructions to some old Cheetah1.1 printer controller that I had lying about. It has 4×2209 stepper drivers on it with cooling fins so hopefully that’ll be powerful enough.. Otherwise I’ve got external drivers too.
So the idea is to drive the XYYZ steppers from the 2209:s on the board, use an external relay that’s triggered from the heater output on the board as the trigger signal to the plasma unit and connect the micro switch that’s on the Z axis to the Z endstop on the board. That way I should be able to write scripts that’ll handle all the operations the plasma needs to do..
But that’s for tomorrow.. That and reworking the Y-axis braces and the stepper mounts.
TBC