
Efter en lång väntan har vi äntligen dragit igång vårt nästa robotprojekt, Tilda och jag.
Vi började med att Tilda skrev en lista med funktionskrav, och efter det bestämde vi vilken hårdvara vi skulle använda till projektet, och satte igång med CADen..

För framdriften blir det stegmotorer av mindre-kinamodell som kontrolleras av en Raspberry Pi 3 som får sina indata från en sonar för avståndsmätning till väggar, en IMU för att detektera om skumma saker händer och en PS3 bluetoothkontroll för manuell körning.
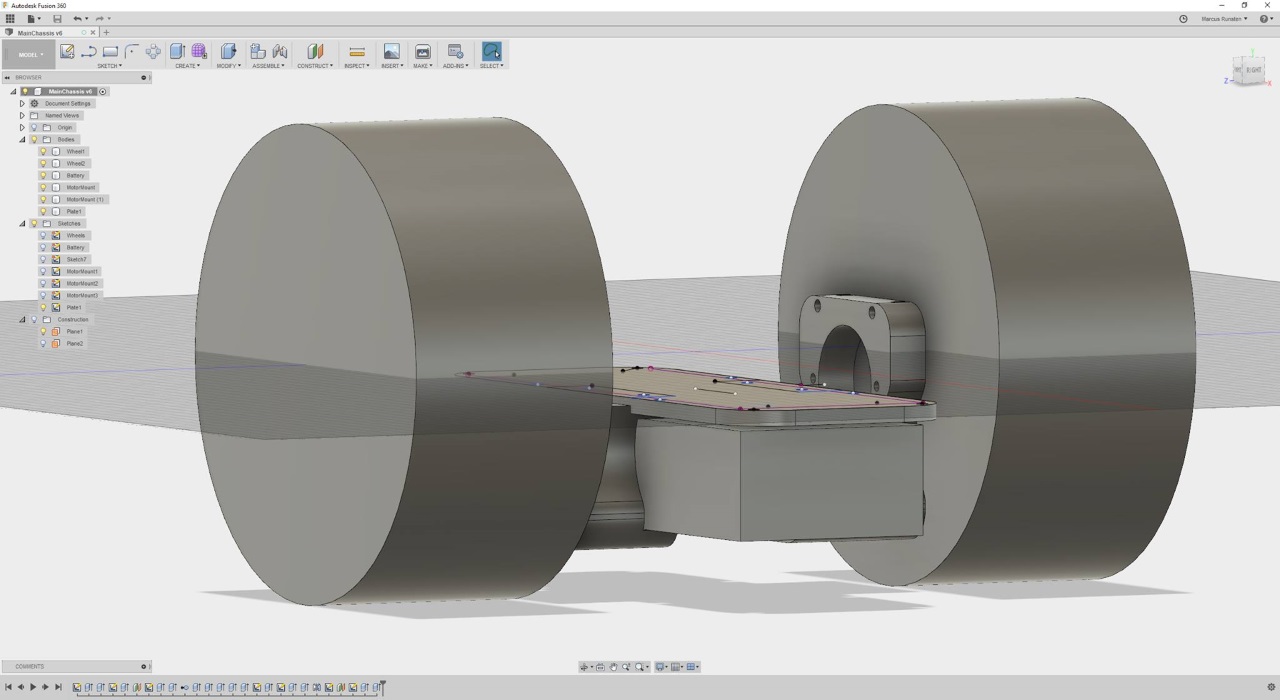
Stora hjul och lågt monterat batteripaket gör att vi förhoppningsvis ska klara oss utan stödhjul fram och bak..
Efter lite avancerad cad och en evinnerlig väntan på lite utskrifter kunde vi så börja montera.. eftersom att TIlda stod för mätningarna och jag för cadden så passade allt som en byggsats..
Bara att installera motorerna och skruva fast.. Till chassieplattor valde vi 4mm makrolon som fräsen fick bidra med utskärningen av..
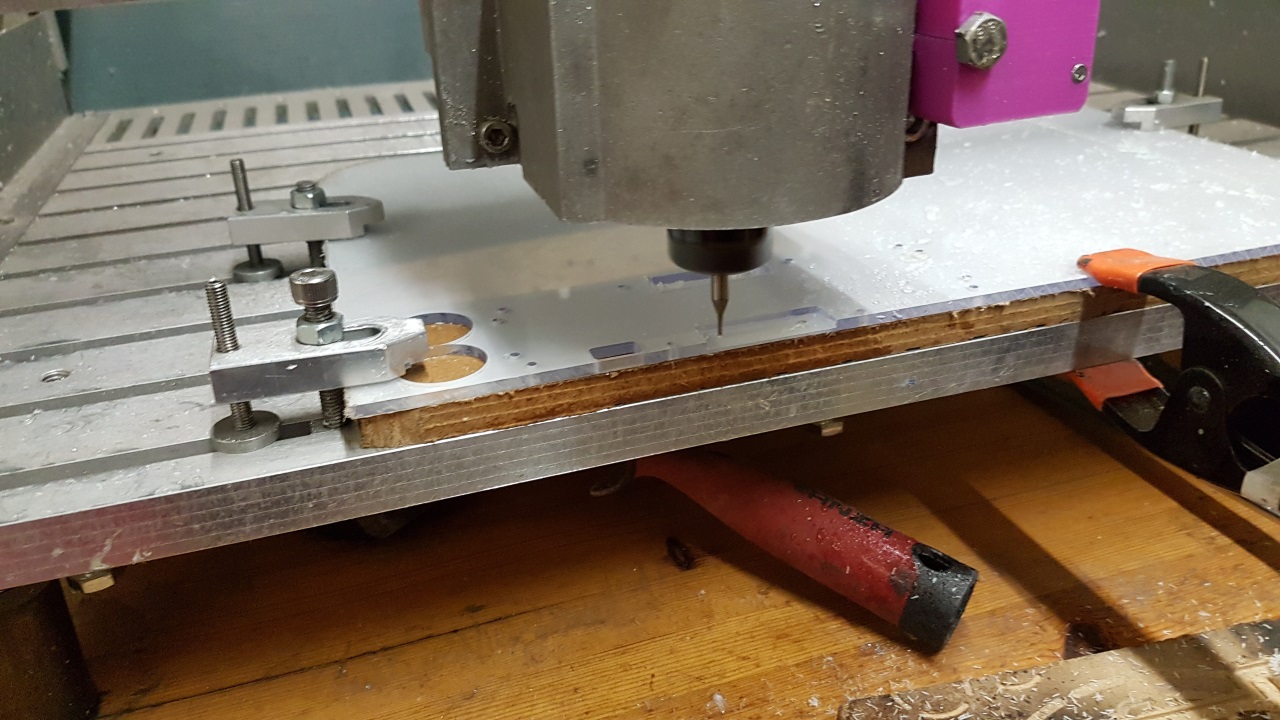

Makrolon i fräsen blir riktigt snyggt och hållbart! Eftersom att jag glömt att kompensera för fräsens radie när jag caddade upp makrolonskivorna blev det tvunget att ta till gammeldags åtgärder för att passa in motorfästena..

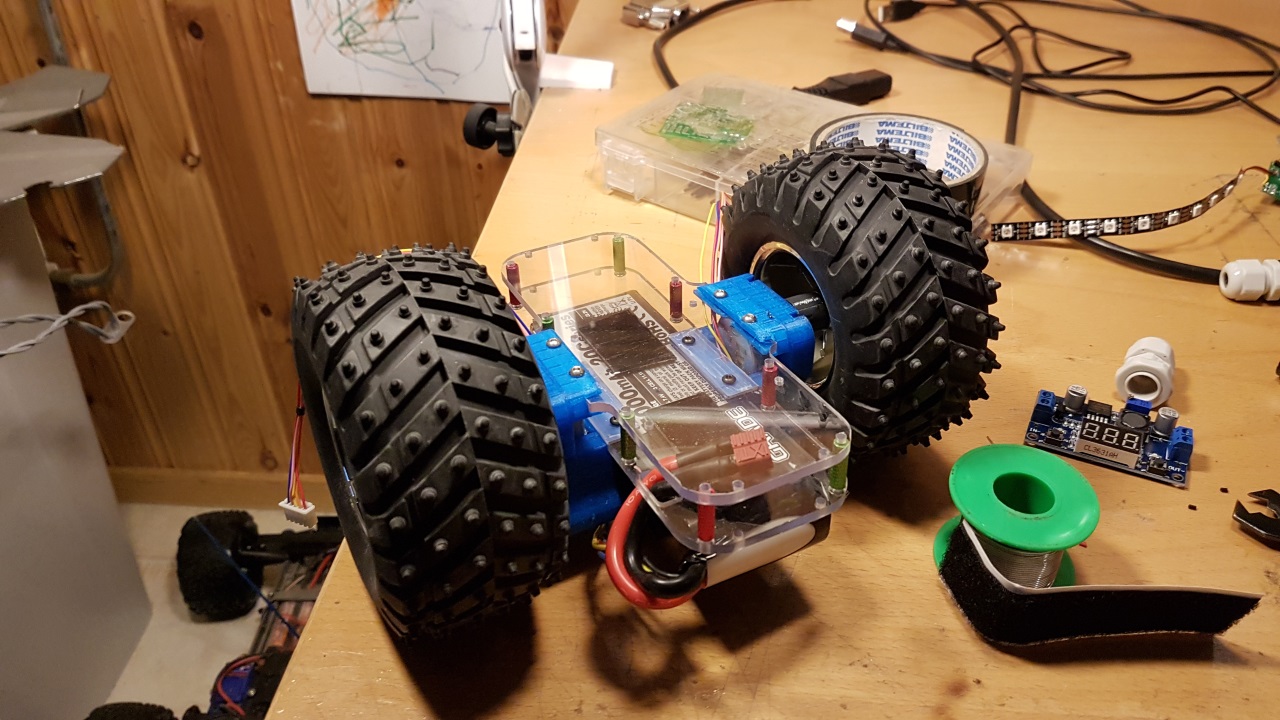
Vi valde att använda vanliga aluminiumdistanser mellan plattorna och motorfästena undertill för att ge stabilitet.. och dessutom är de snygga.

.. och efter första byggdagen var detta vad vi hade..
Eftersom att våra hjuldistanser var lite för korta, så att gummidäcken skrapade i ramen, så skrev vi ut nya distanser idag som passade bättre.. Tyvärr blev de lite tighta, och när Tilda föreslog att vi skulle skriva ut nya som var 0,3mm större så kontrade jag med att ta till hammaren – och slog sönder stegmotorn.. så nya motorer är beställda, men det blev ju ingen körning idag då.. =/

Men vi har en raspberry på plats, som får ström via en 3 amperes BEC från en 3s acc på en 5000mAh eller liknande. Vi kan koppla upp oss mot roboten, och vi har lyckats koppla upp en bluetooth gamepad och få signal ut genom våra NodeJS script på maskinen.. så imorgon ska vi koppa i stegmotordrivarna och testköra lite.. hoppas vi. Lär ju gå sådär med en trasig motor, men jag ska försöka laga den lite bättre.
Fortsättning följer..