
Häromdagen hittade Tilda vår gamla “Robot” som vi byggde och lekte med för länge sedan, “Robban” (gammalt inlägg) och genast kom hon på idén att vi borde automatisera robban lite mer, så att man inte behöver styra den med en radio.
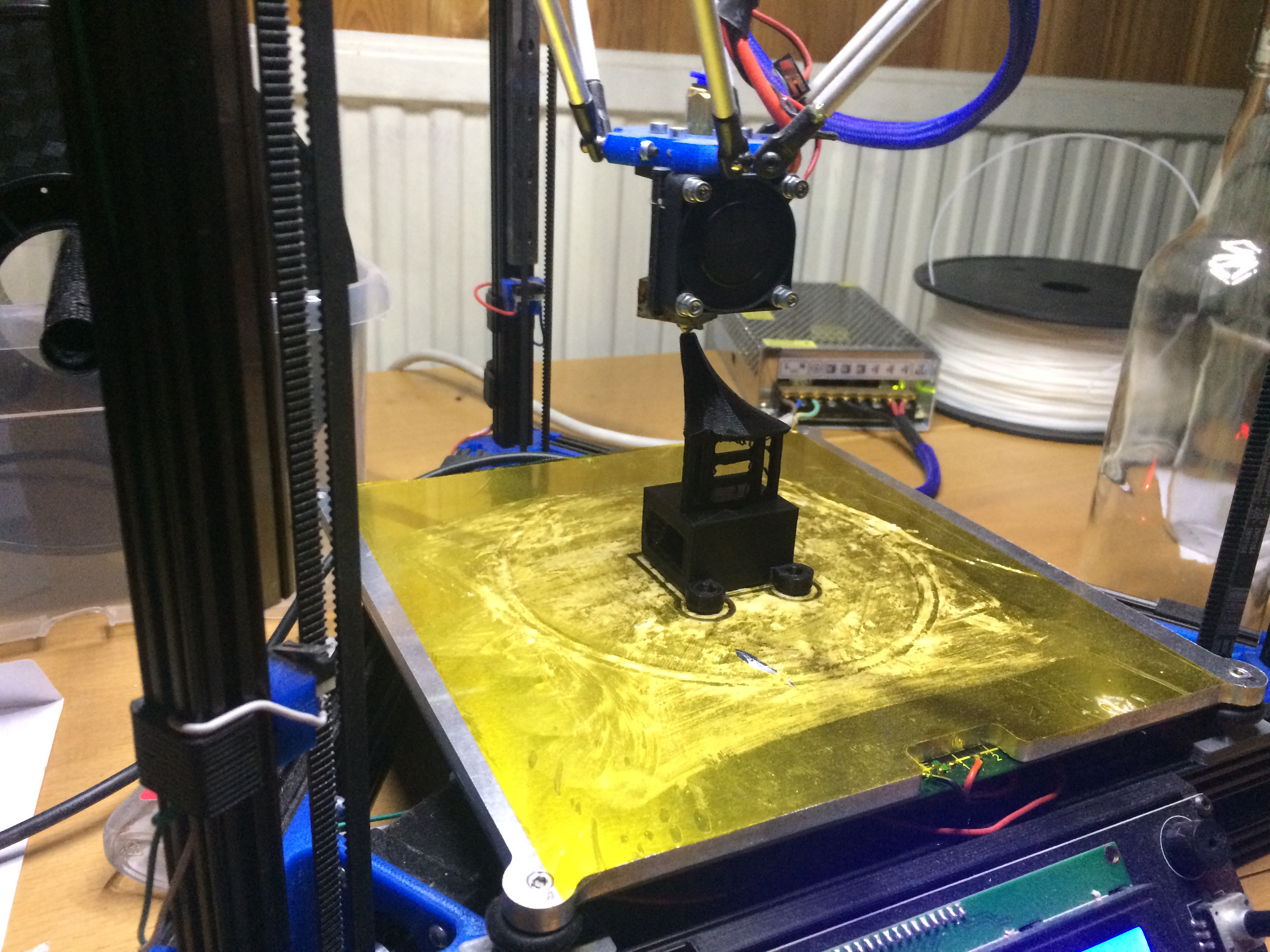
Sagt och gjort, Tilda började riva ner Robban i dess beståndsdelar för att se vad vi kunde återanvända. Planen var att skriva ut en kropp, använda en Arduino Nano för styrningen och bygga lite sensorer och LED-indikatorlampor som får visa robotens satatus. En konceptskiss ritades upp rätt fort, och en kropp skrevs ut i all hast:
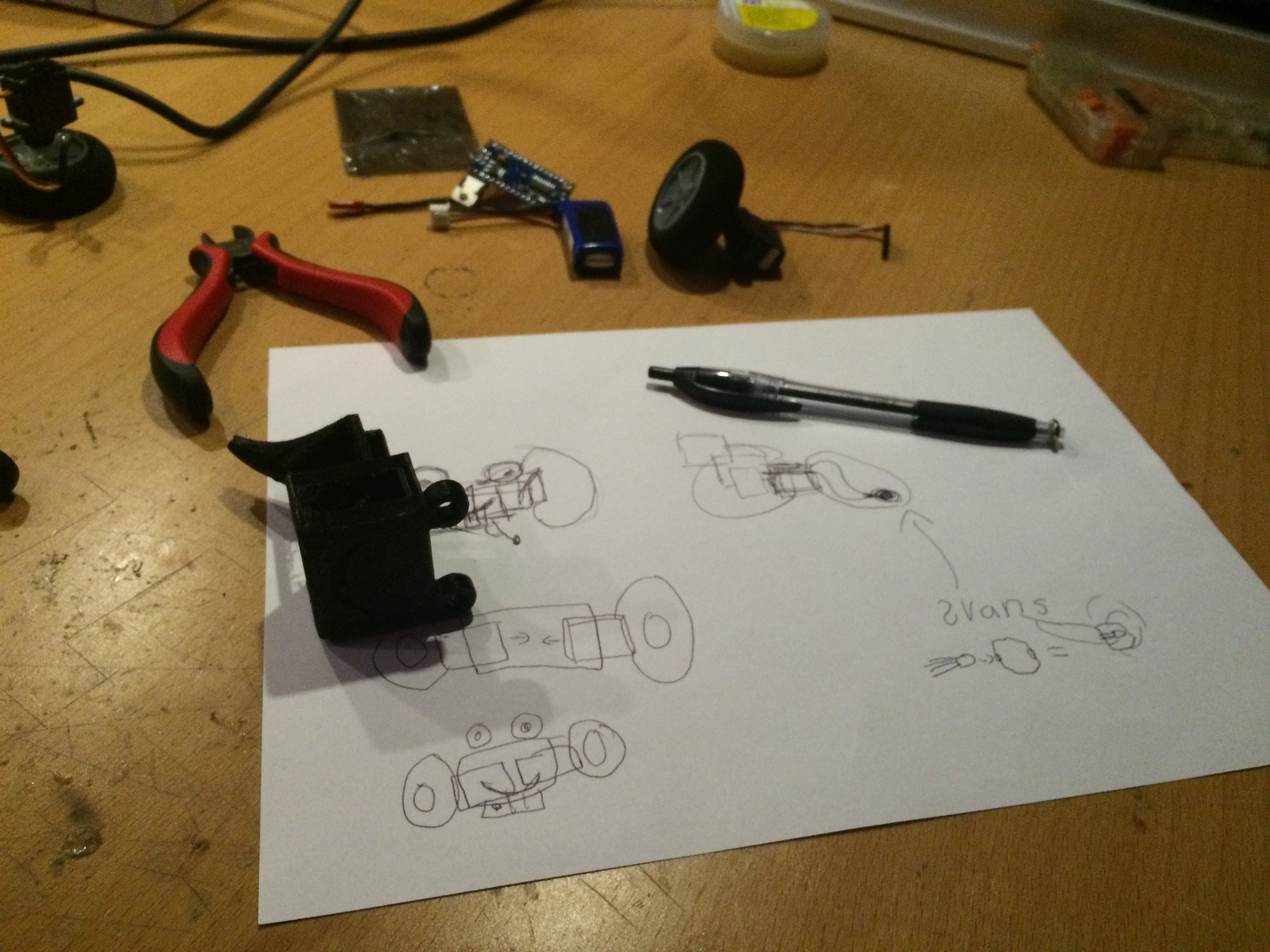
Nästa steg blev införskaffning av proviant och proviantering bland Tildas pysselsaker för att hitta en lämplig svans varefter monteringen började..

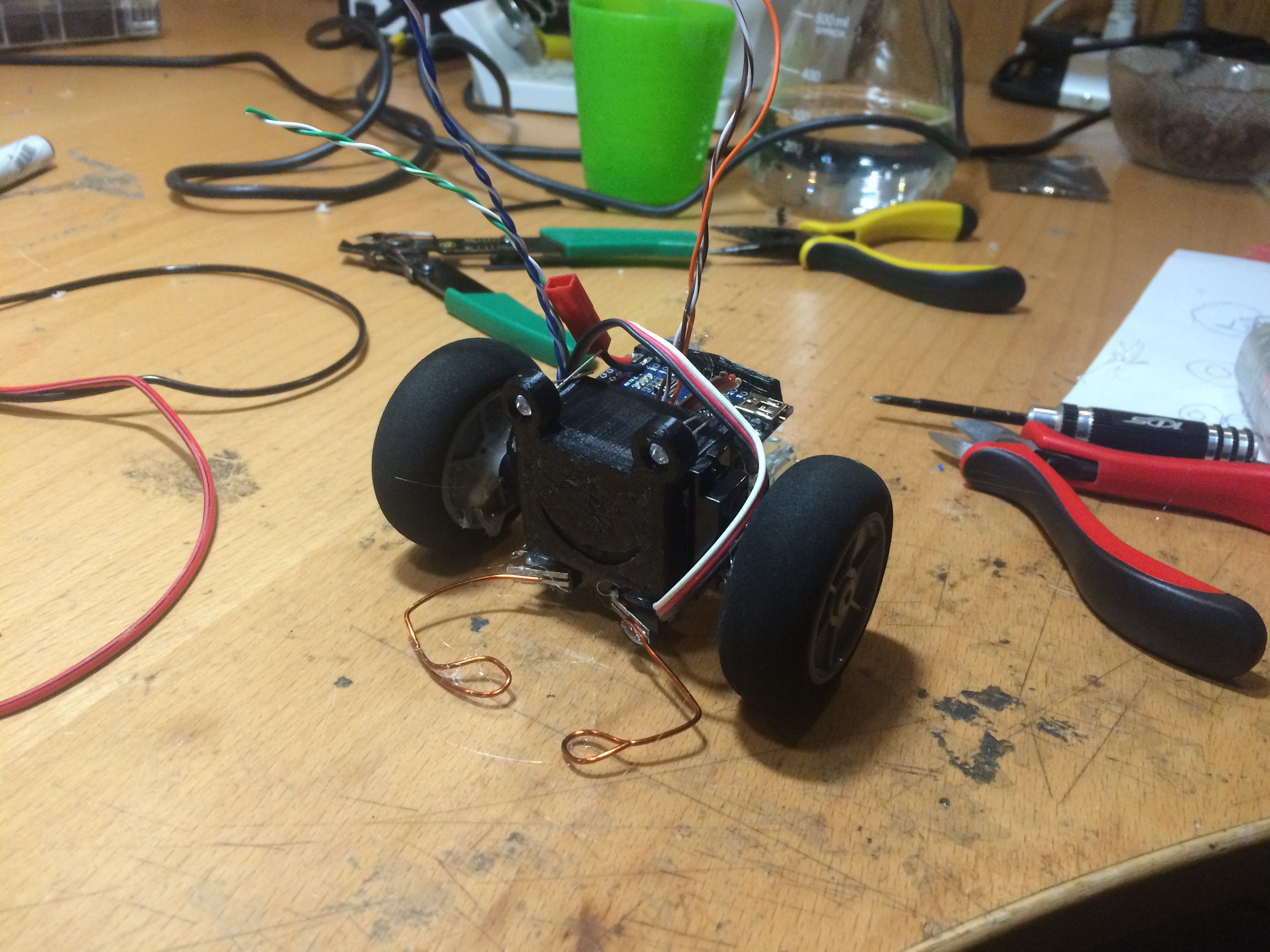
Lila lysdioder som ögon, koppartråd som sensorarmar, och en fin pärla med en RGB-lysdiod i svansen, lödningen fick pappa stå för idag då det var lite småpilligt..
När så allt var monterat och lött så var det bara programmeringen kvar. Här hjälptes vi åt att bestämma beteendemönster och hur man ska kunna hantera Rover.

Vid den första testkörningen visade det sig att våra koppararmar inte satt tillräckligt bra, och att de lätt fastnade under socklar och trösklar, så det fick bli en revision till version 1.1:

Testade att skriva ut armar i PETG plast istället för PLA som jag vanligen skriver i. Blir riktigt fin kvalitet på PETG-utskrifterna och plasten är riktigt slitstark. Luktar dock en aning mer än PLA när man skriver ut den. Efter denna uppgradering blev det lite mer testkörning:
Problemet vi har just nu är att våra ombyggda servon börjar driva lite med temperaturförändringar, så det är svårt att få Rover att stå stilla eller gå rakt fram. Vi har klurat ut en lösning på det som vi kommer att implementera till Rover version 2, men det blir ett annat inlägg..
Superkul att bygga leksaker med barnen, det är faktiskt det bästa man kan göra med alla prylar man ordnar!