Då fräsbordet var klart och testkört så blev det med ens dags att tag i nästa projekt.. Vi behöver en plattform för att testa underjordsdrönare på jobbet, och vad passar då bättre än att man bygger en? 😉
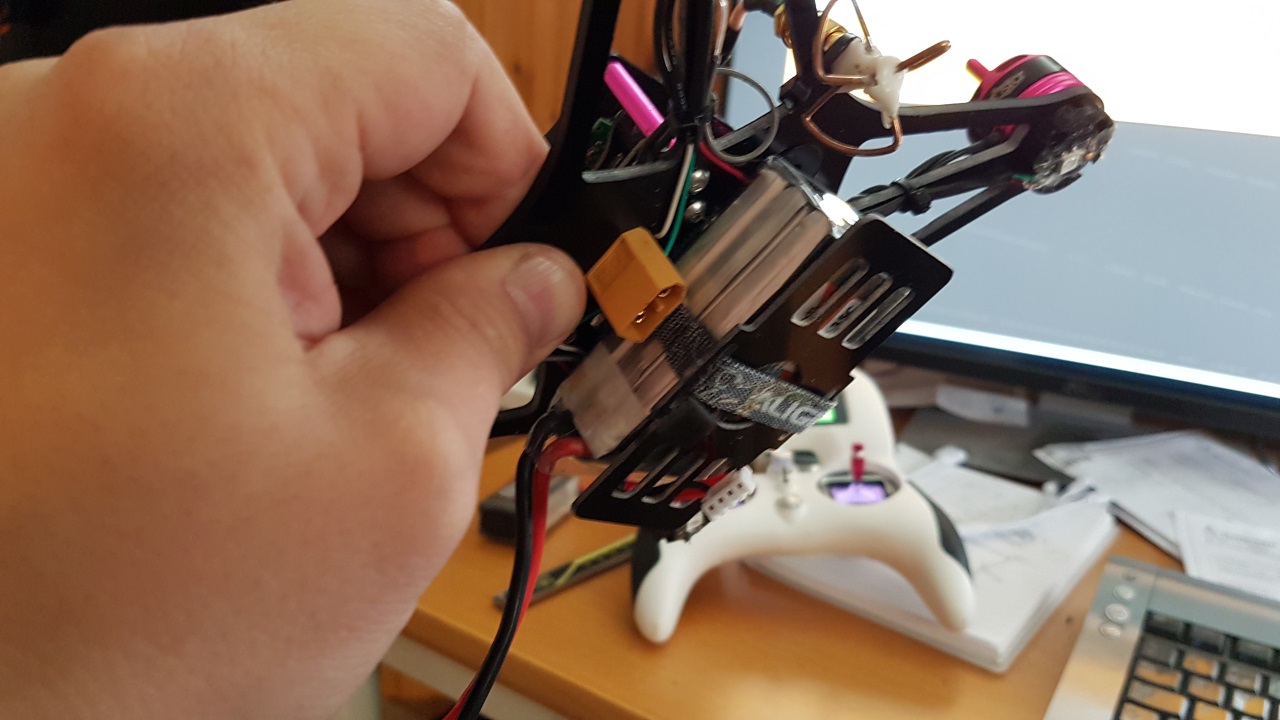
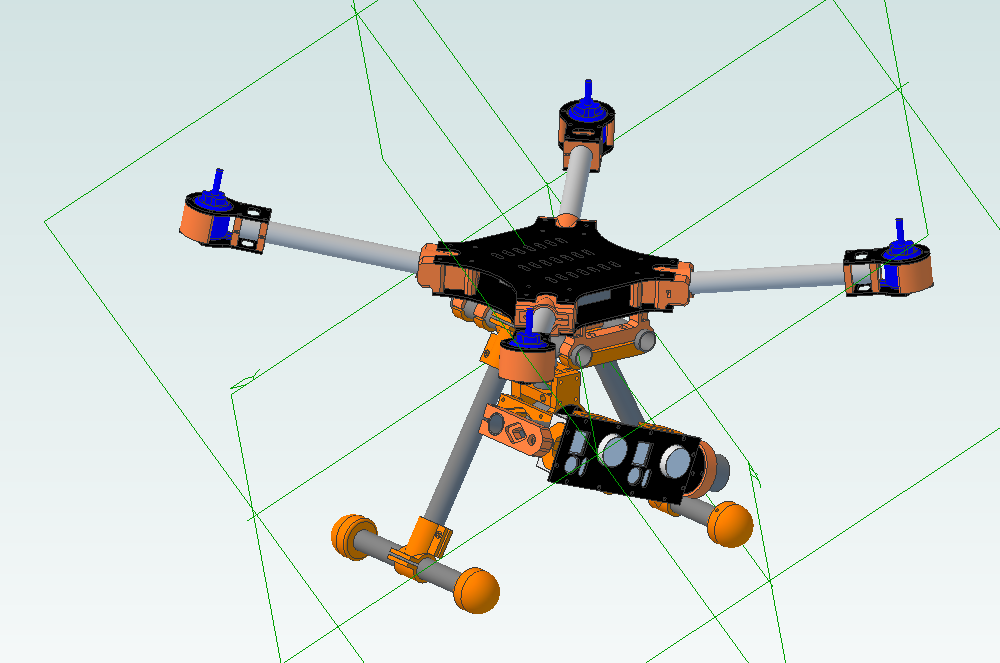
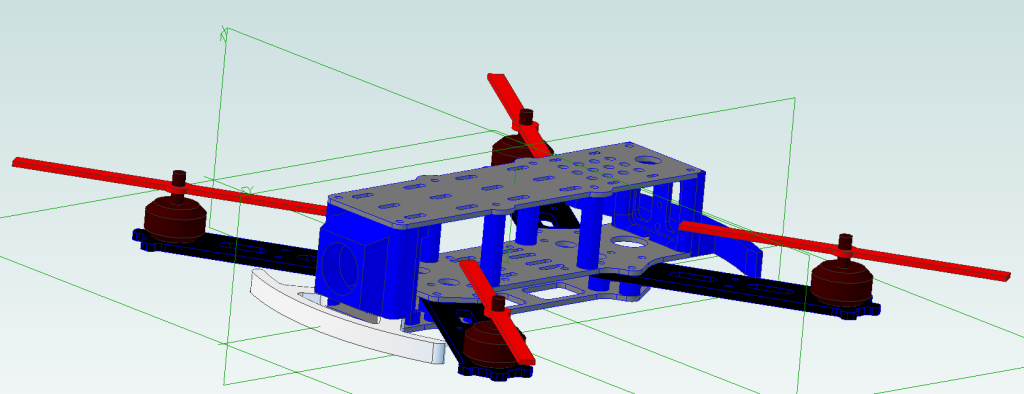
Det blev lite funderationer kring storlek och stil, men jag ville ha någonting som tål lite tuffare tag och som inte käkar propellrar i parti och minut när man får kontakt med bergväggen, så jag bygger min första maskin med skyddade propellrar nu..
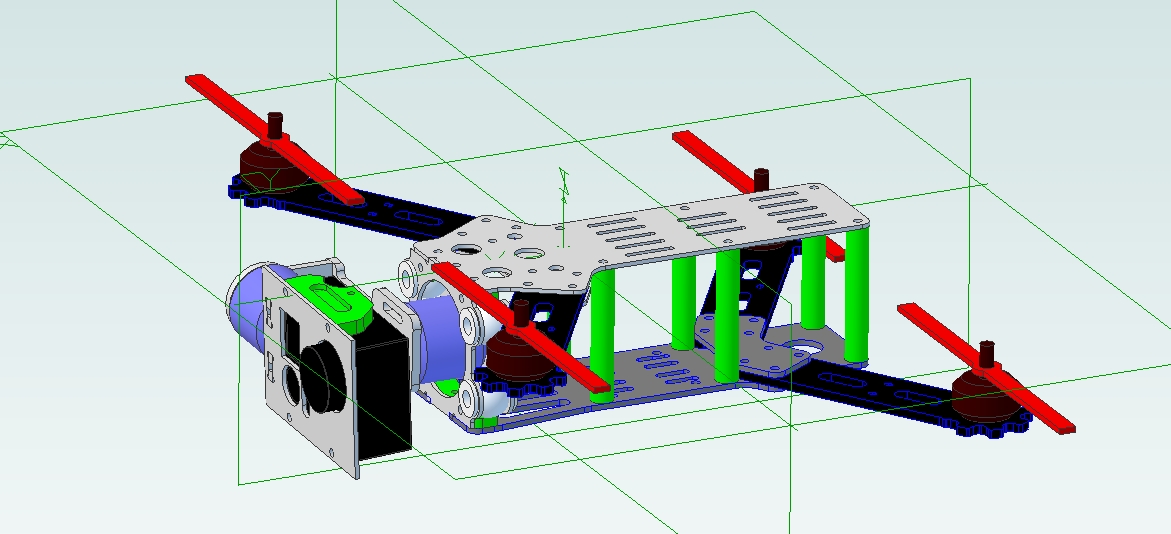
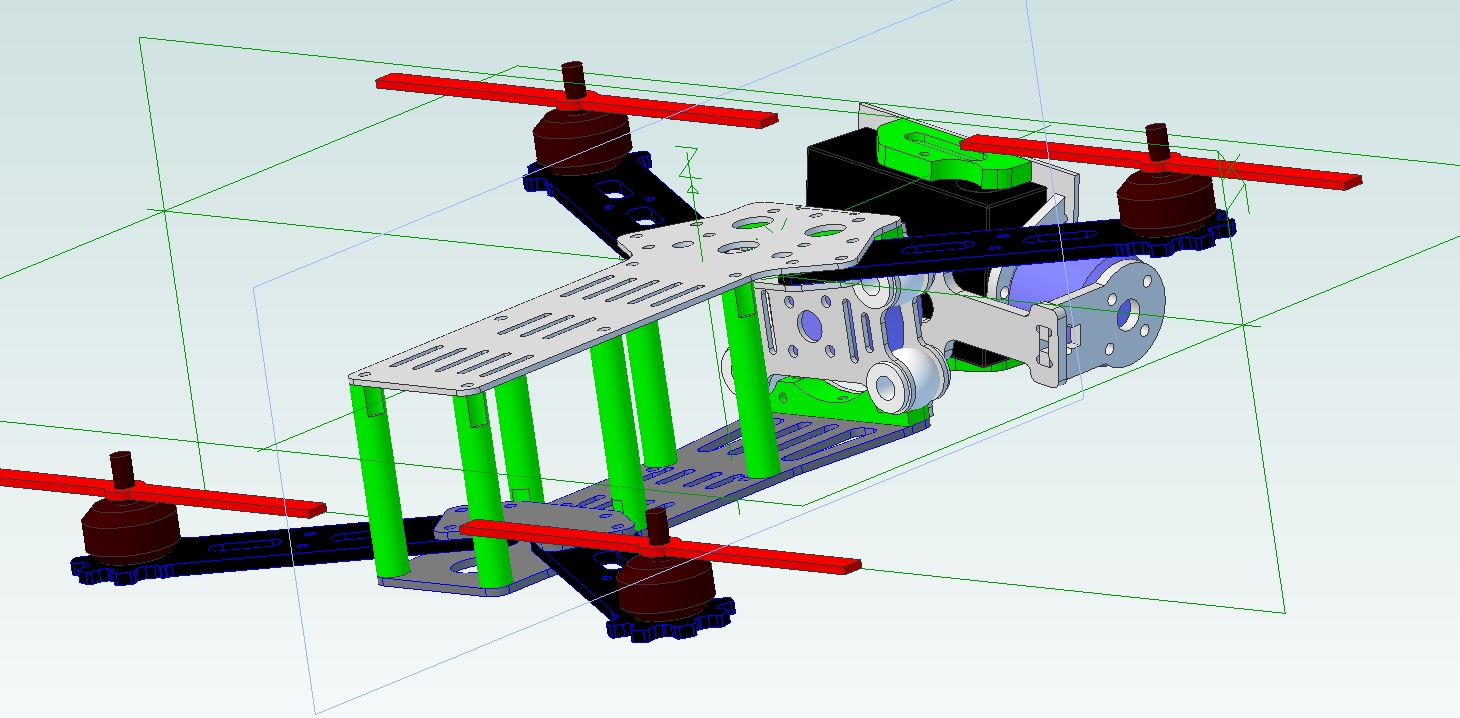
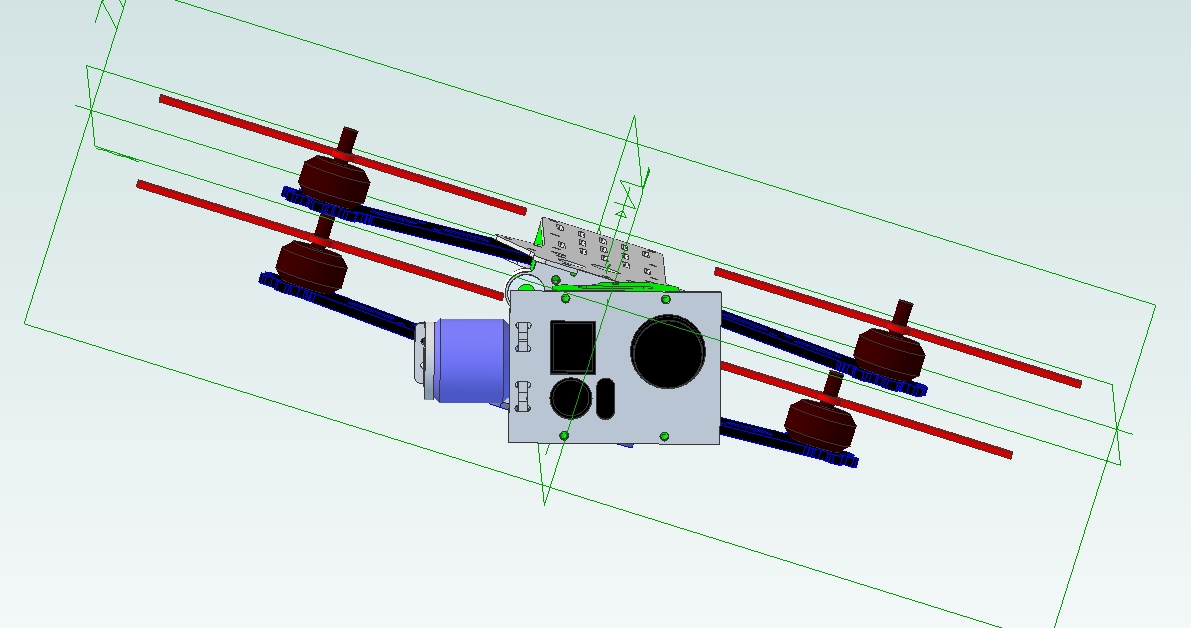
Som vanligt börjar vi med lite kladd i CAD:en..
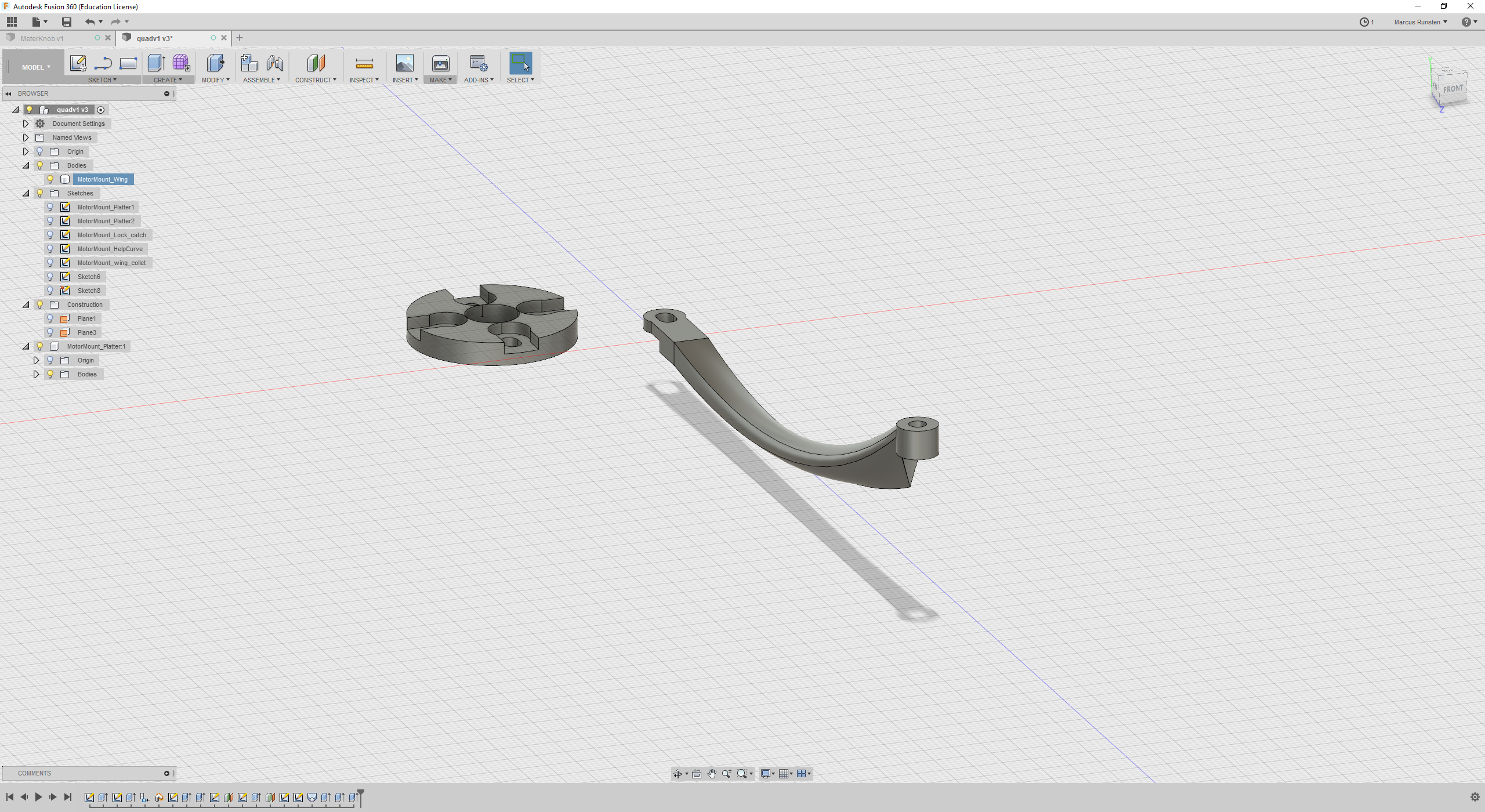
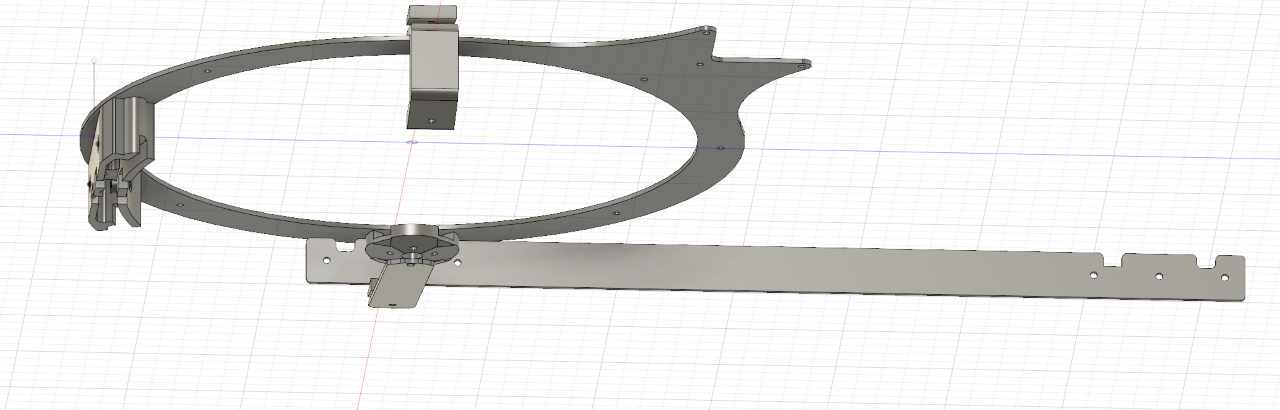
Det blev ett par versioner innan jag hade någonting jag trodde tillräckligt mycket på för att börja tillverka..
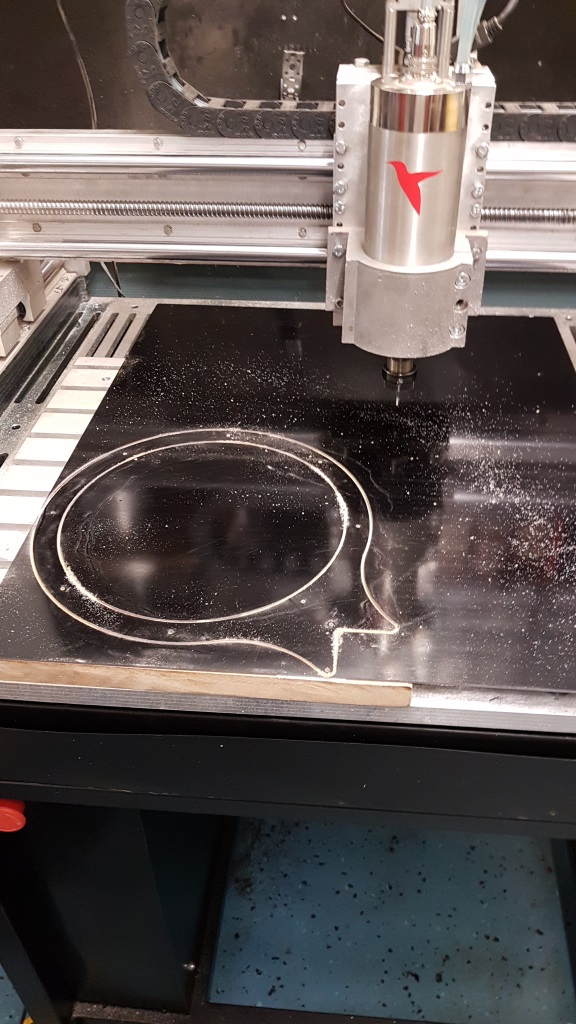

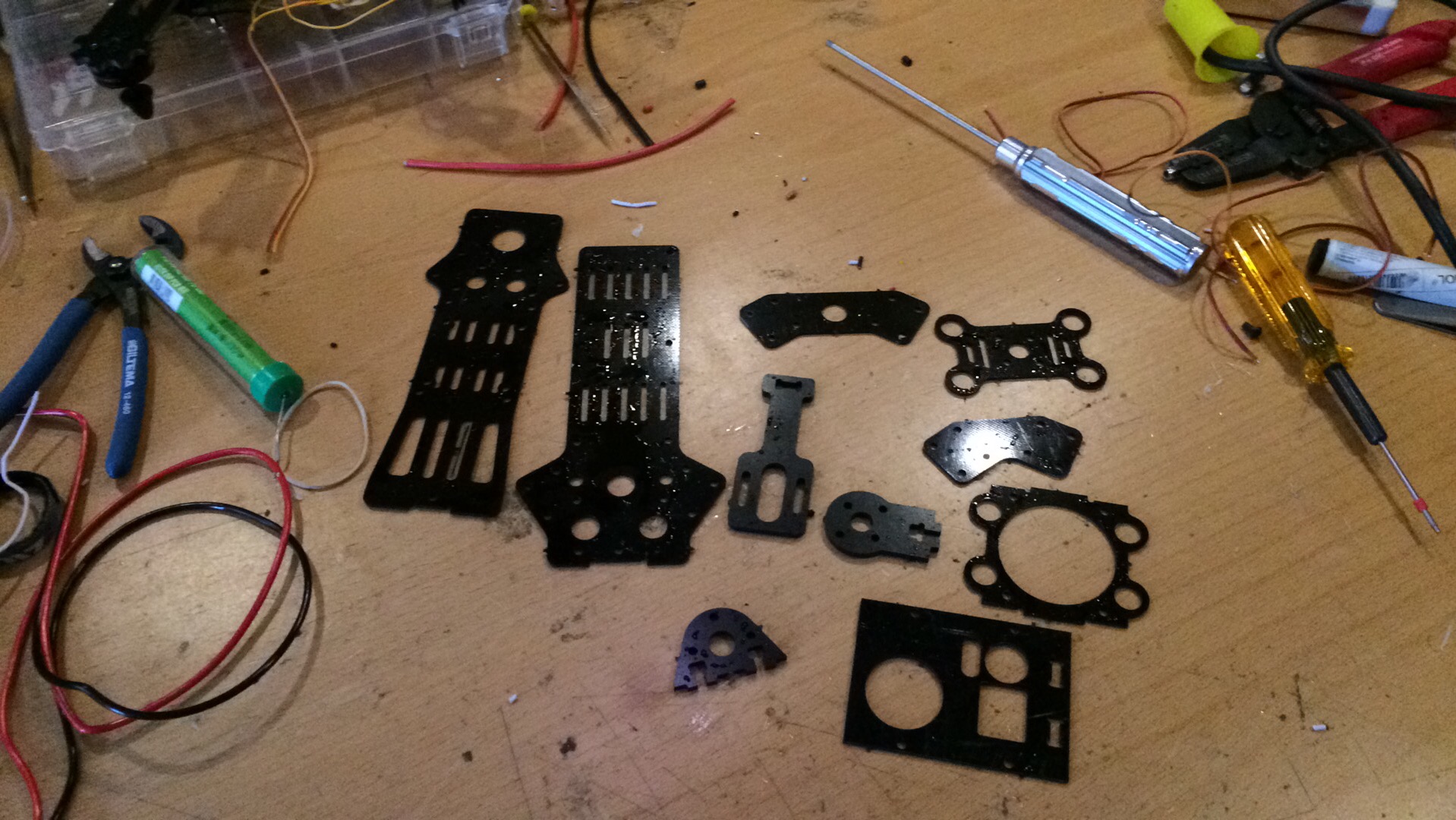
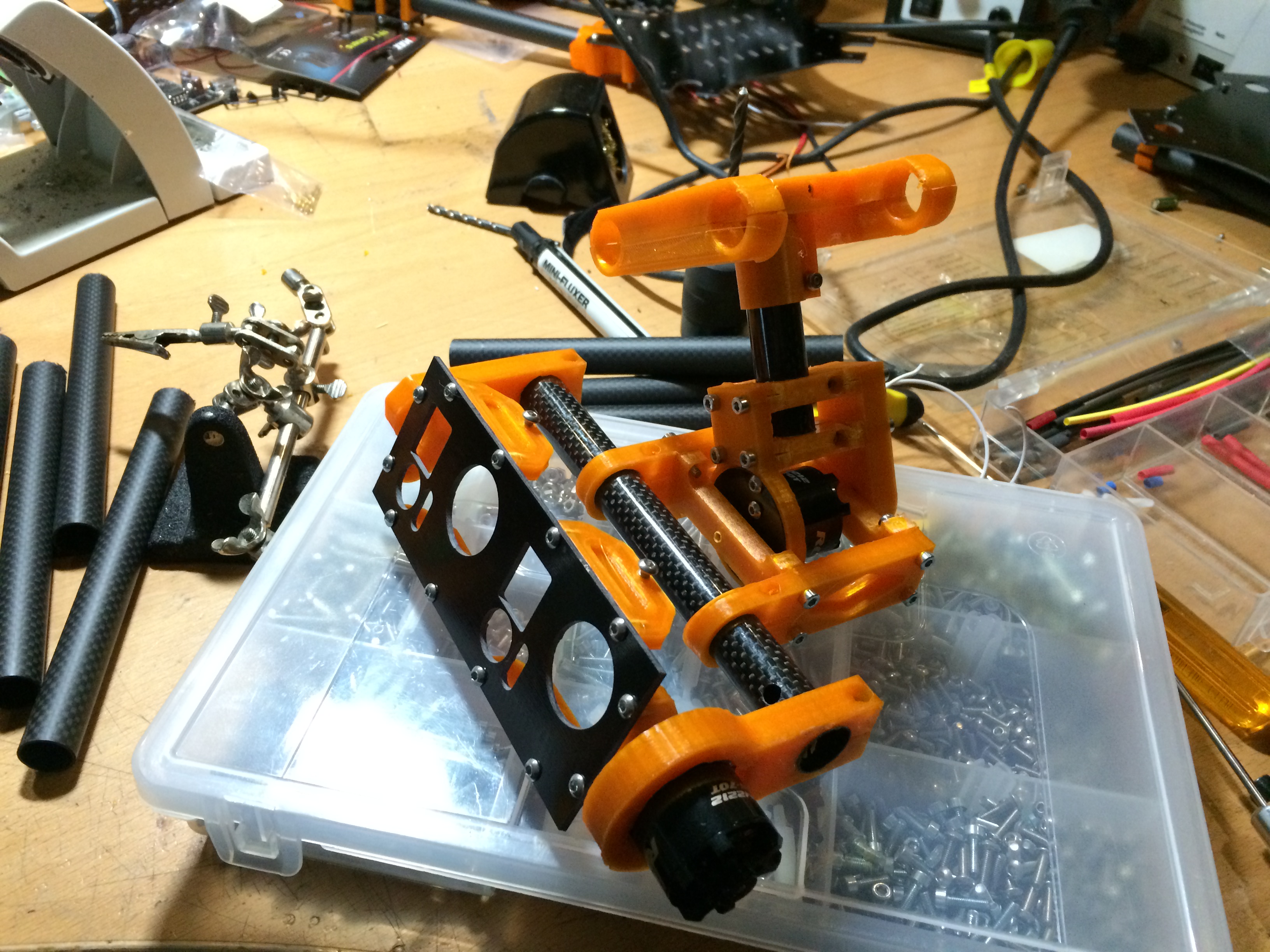
Fräsen fungerar klockrent nu, superenkelt och snabbt att få fram de bitar man behöver från den.. 3D-skrivaren tar lite mer tid på sig, och efter 16 timmars utskrift insåg jag att jag måste modifiera biten jag printar… :/

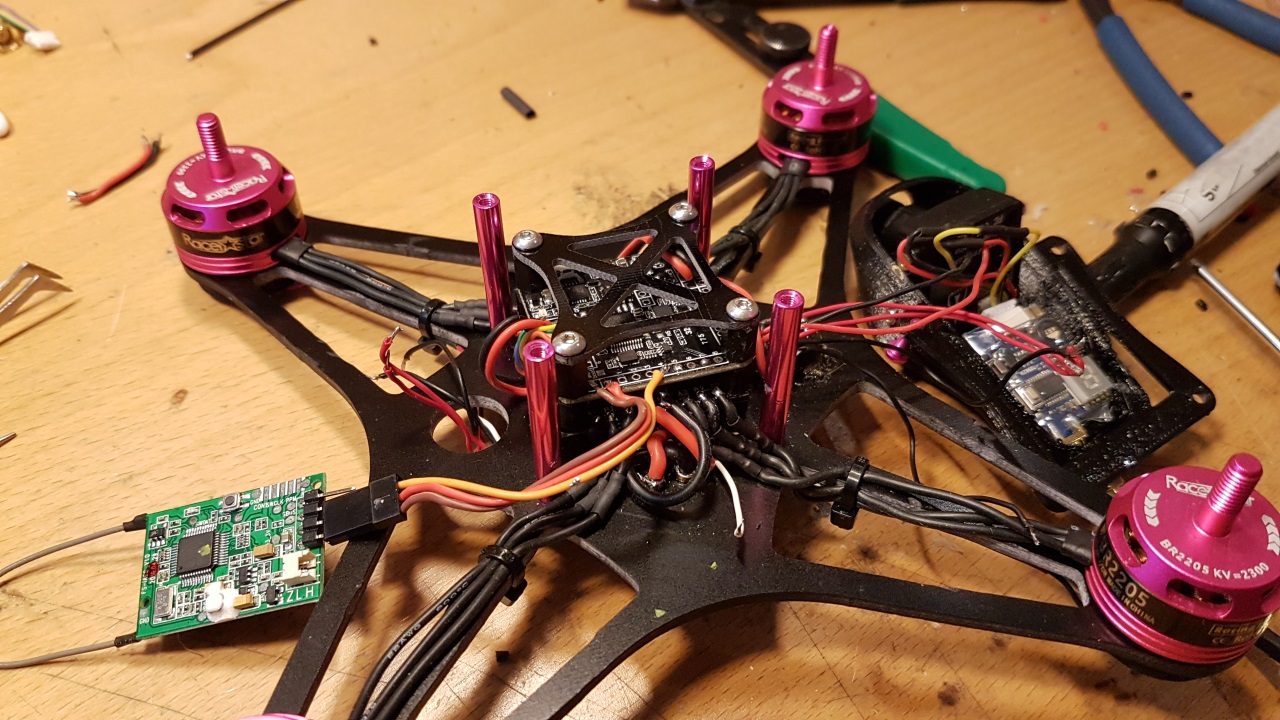
Maskinen blir aningens större än de racingquaddar jag tillverkat på sistone, men så ska den flyga betydligt lugnare och stabilare och med mer last än de små leksakerna med..
Fortsättning följer..