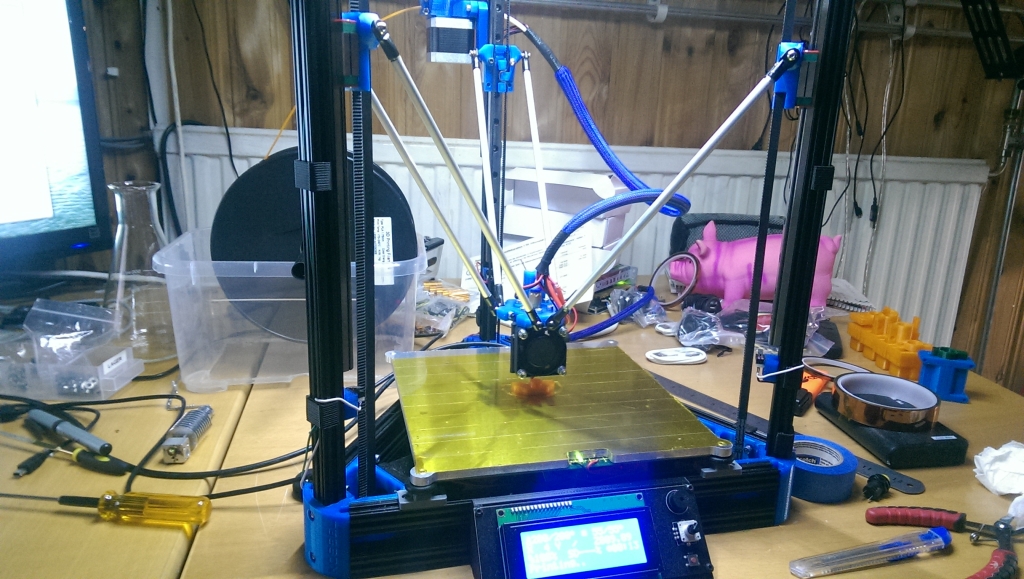
Det var ett digert jobb att printa alla delar som skulle monteras på Quadden, över 80 timmar totalt tog det att skriva ut alla delar..

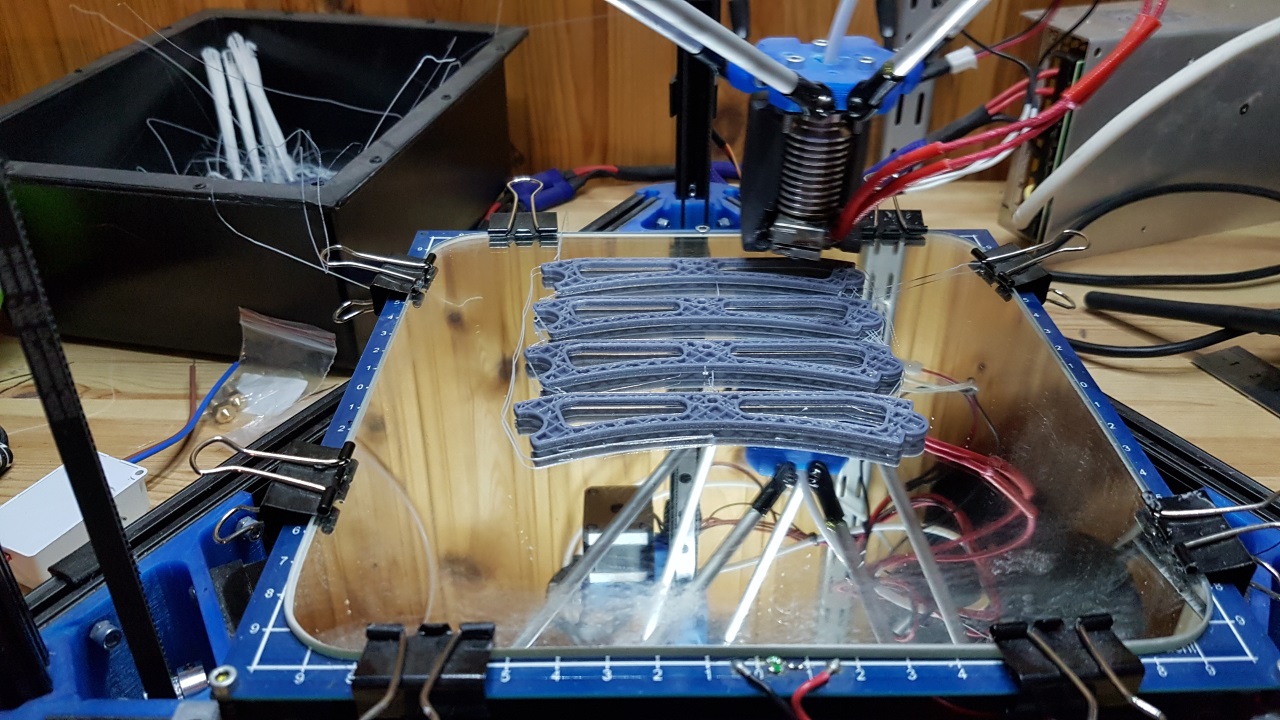

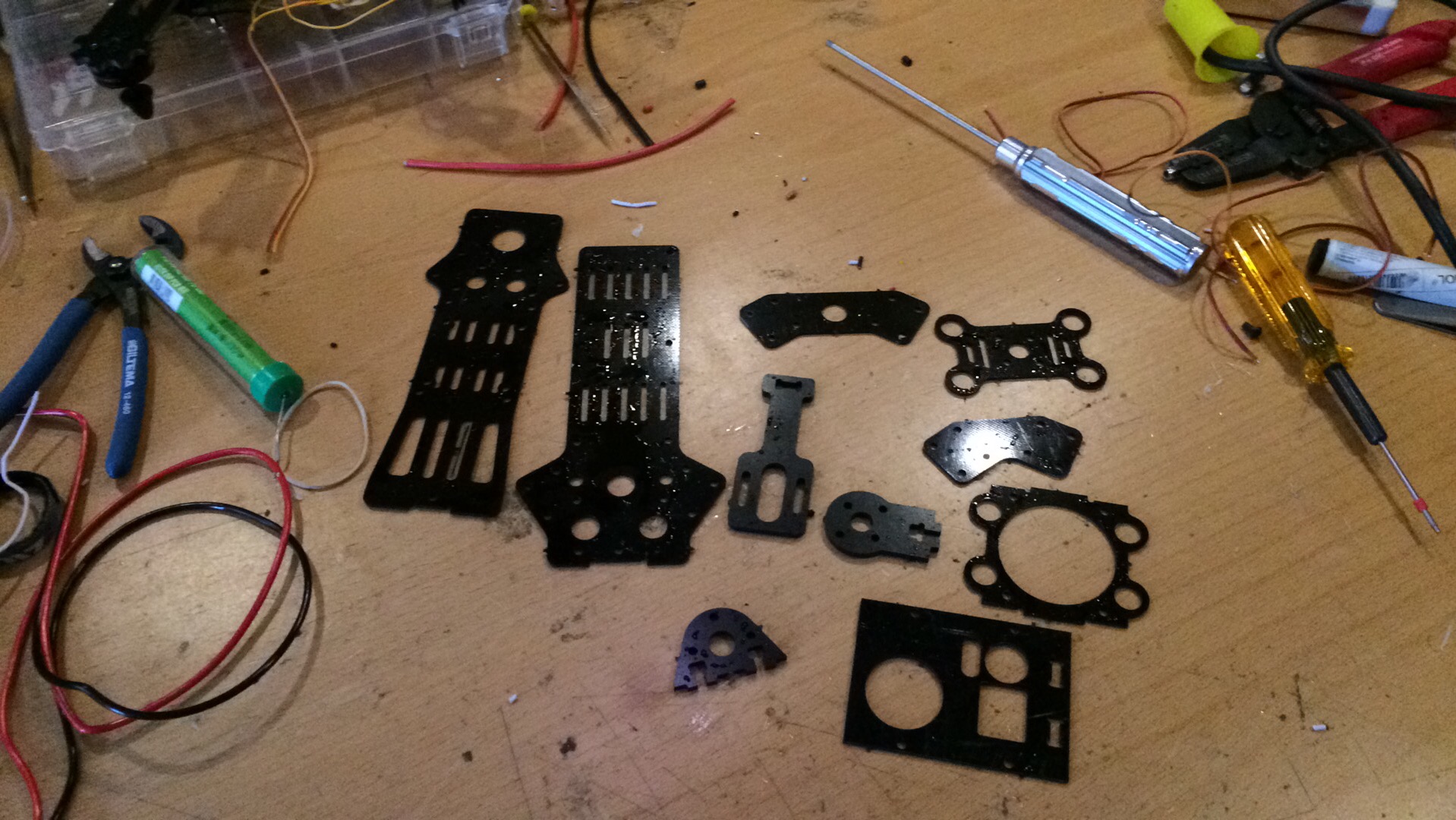
Efter detta printarbete gick det snabbt att fräsa ut de delar som behövdes och bygget kunde påbörjas..
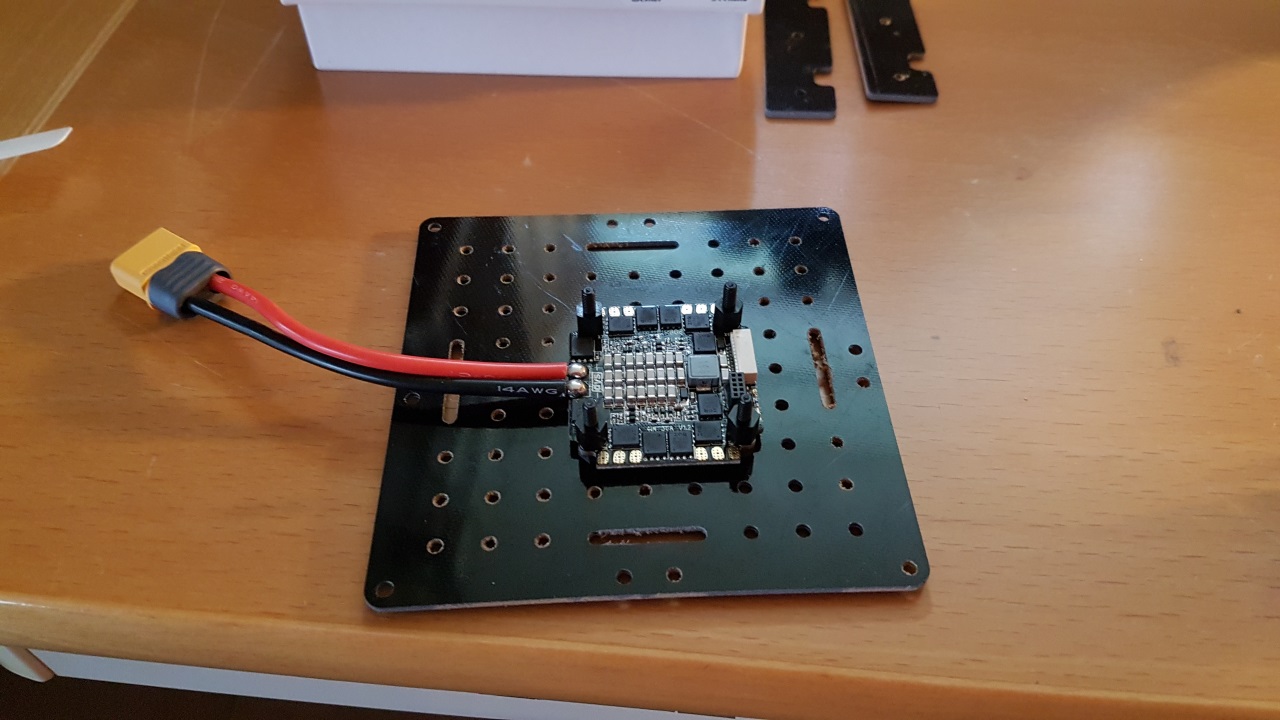
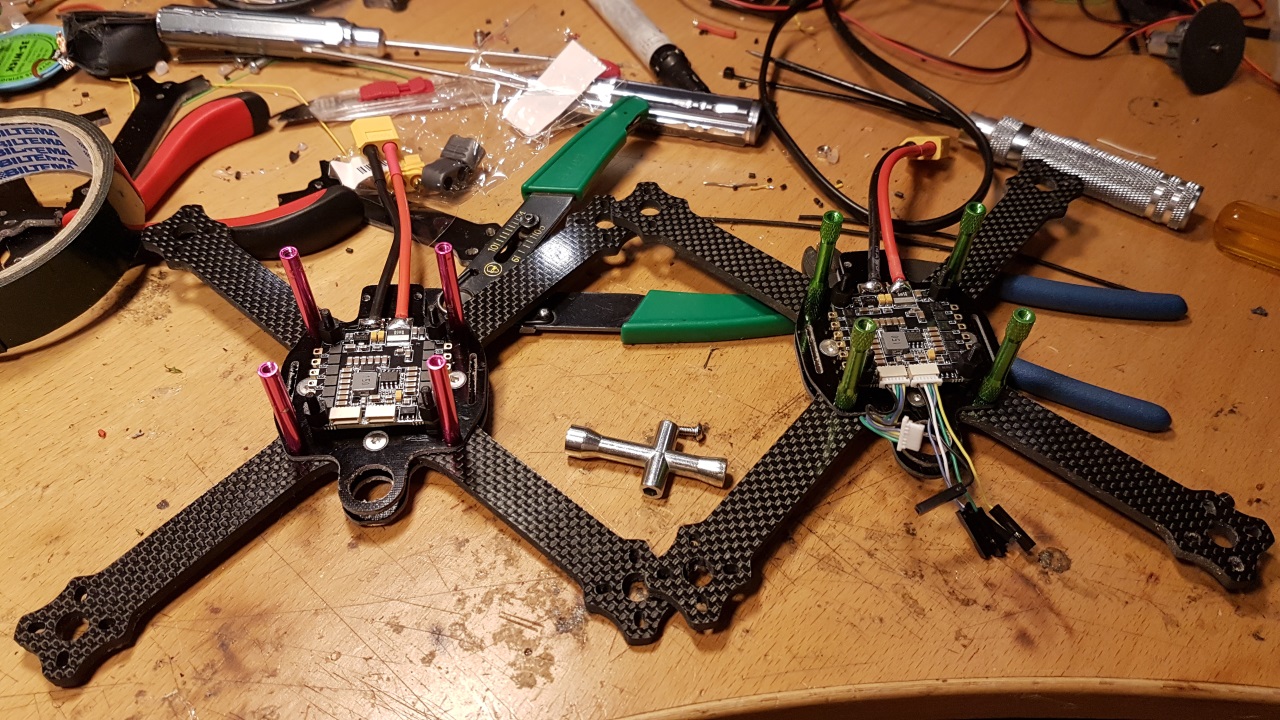
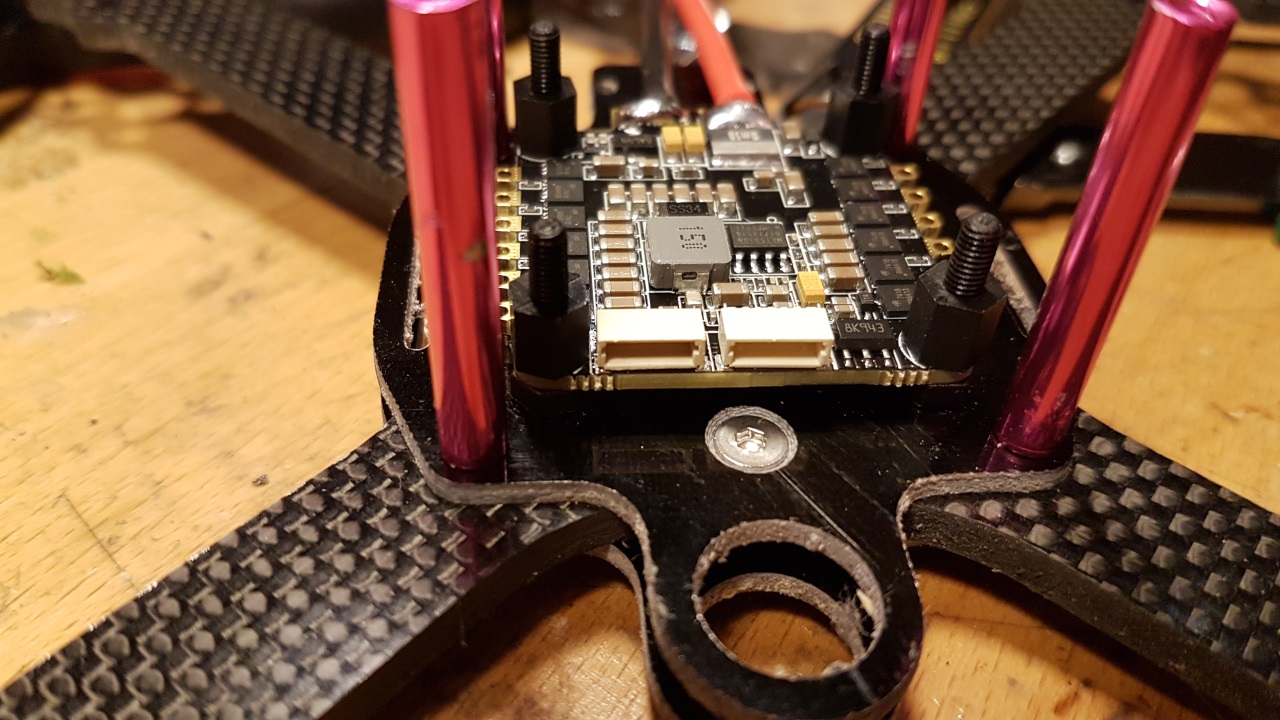
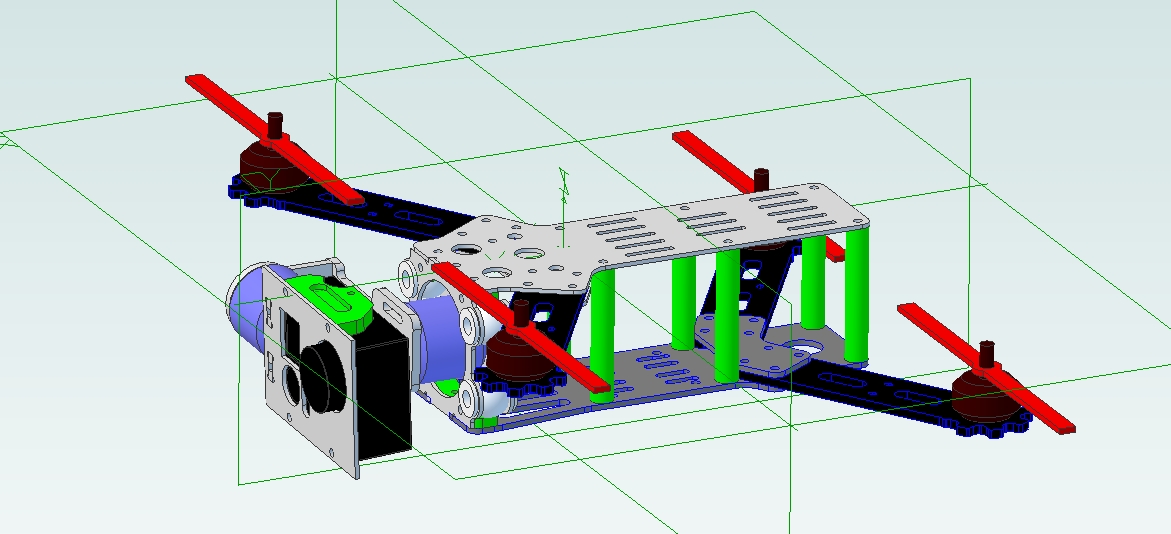
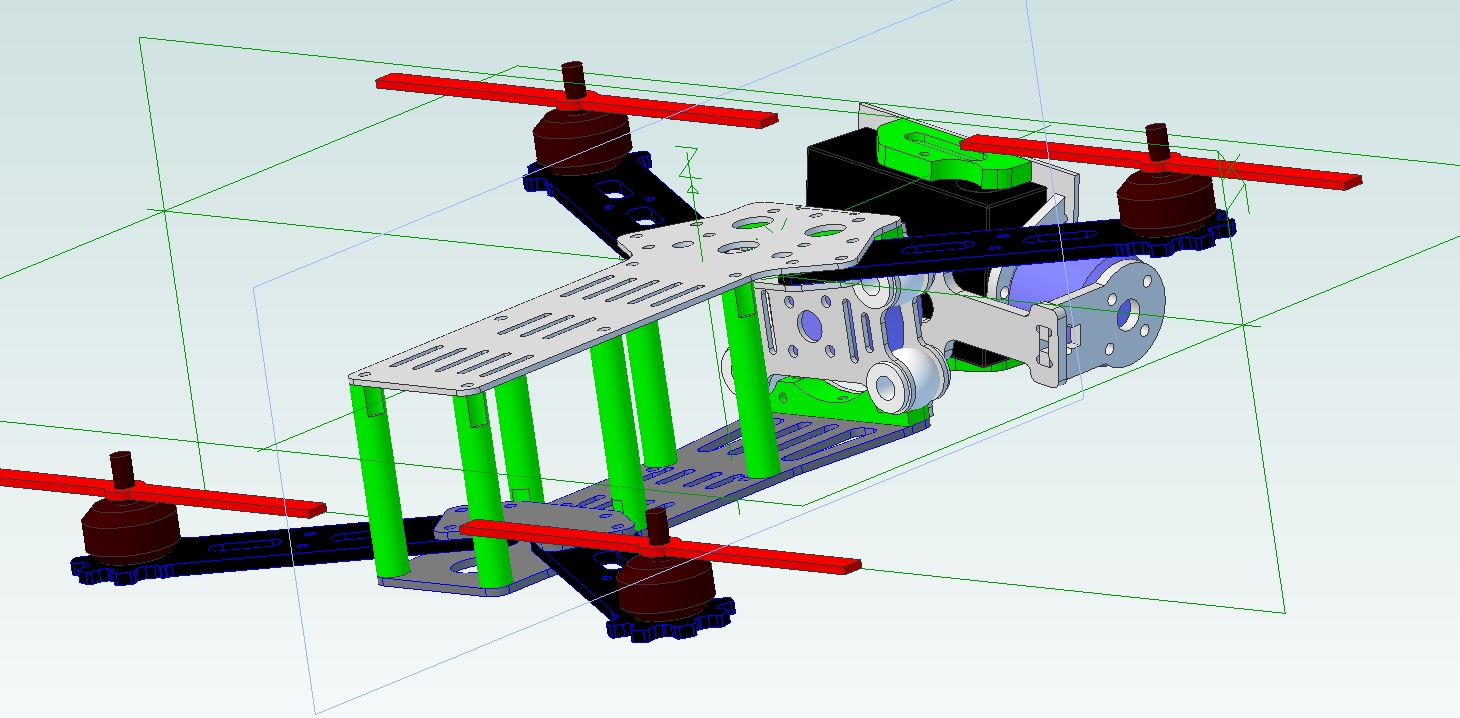
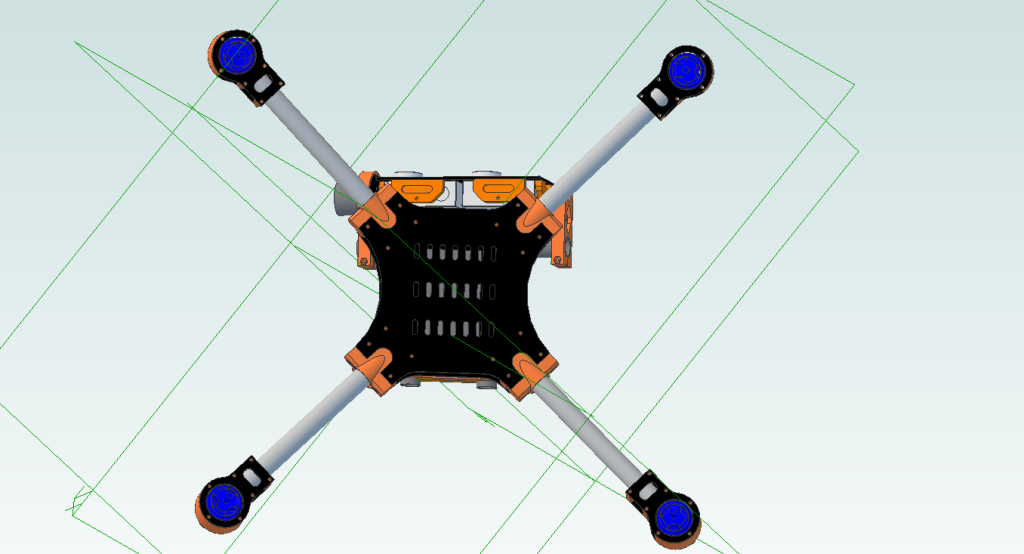
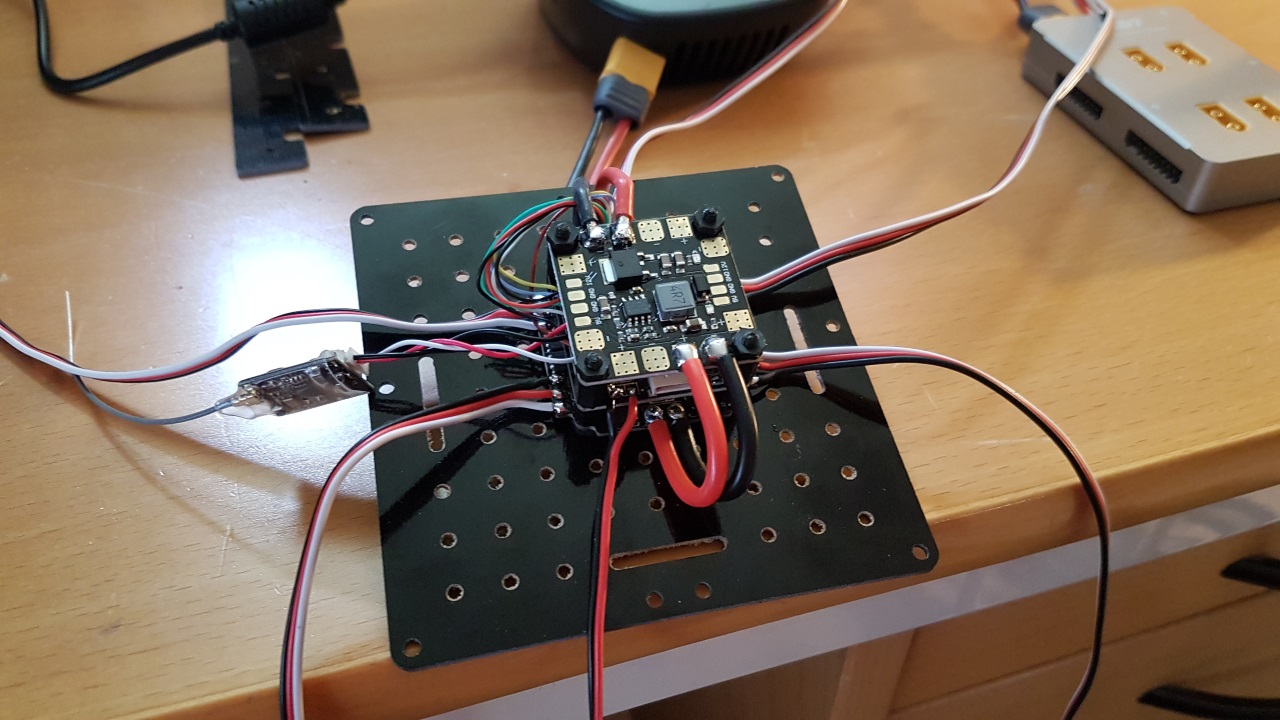
Började med att plocka ihop styrningen på centrumplattan..
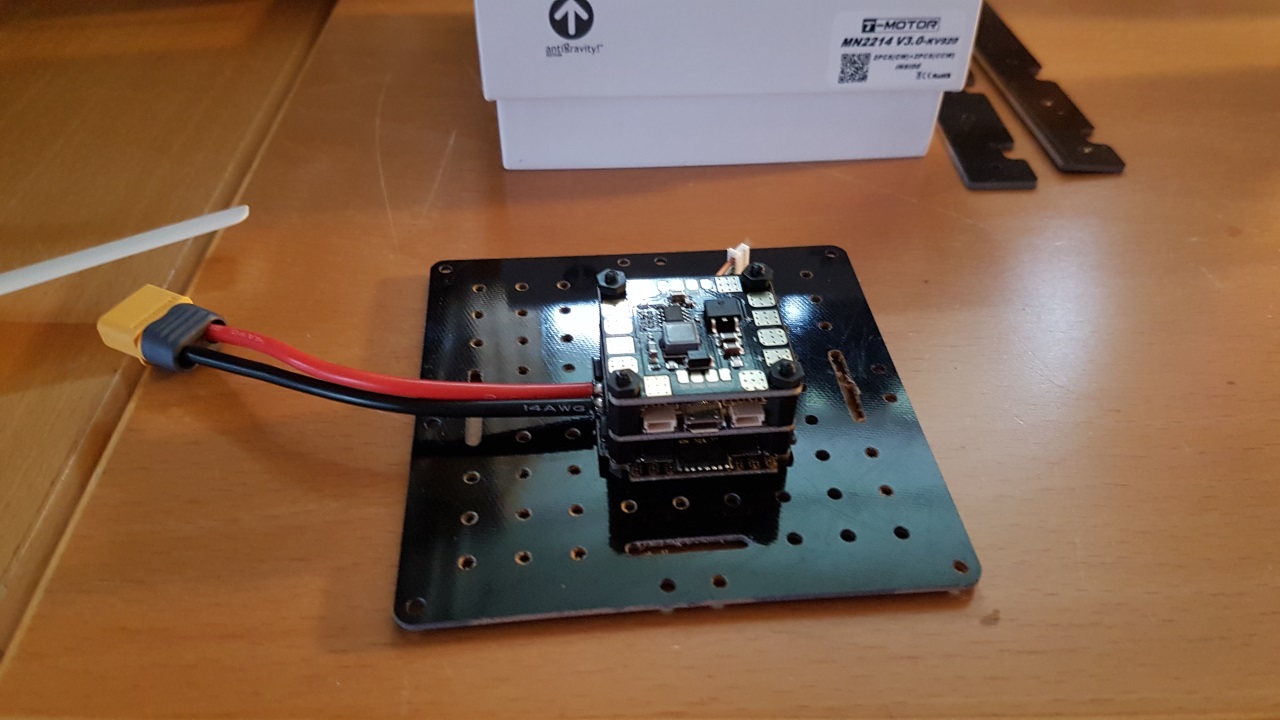
En nätt liten stack med farterglage, flight controller och en power distribution med både 12 och 5 volt för experimentkorten vi ska labba med på maskinen..
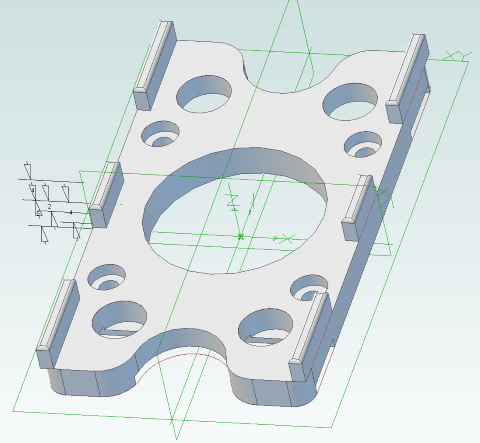
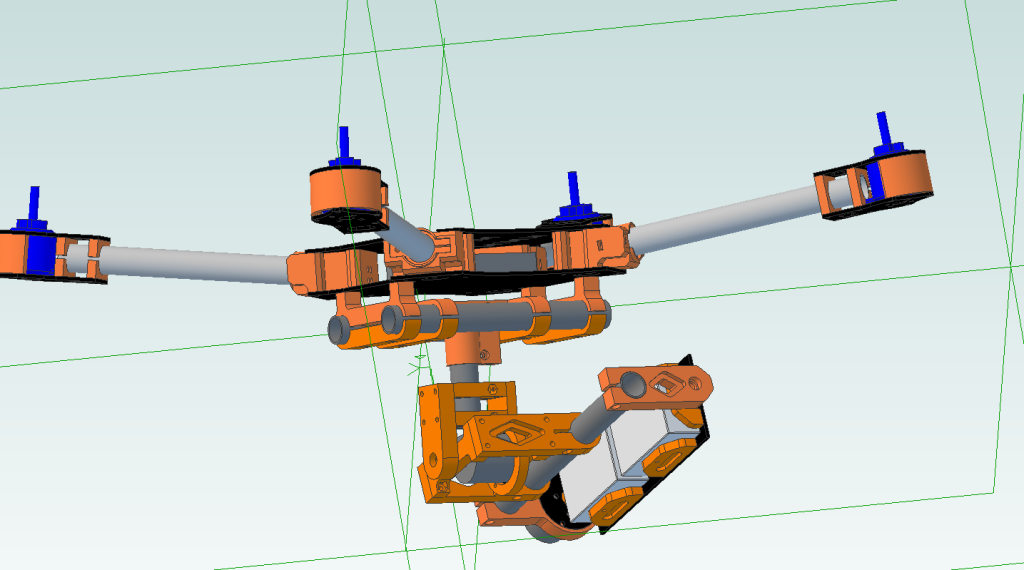
Sista utskrifterna blev de centrumdelar som ska hålla ihop hela maskinen..
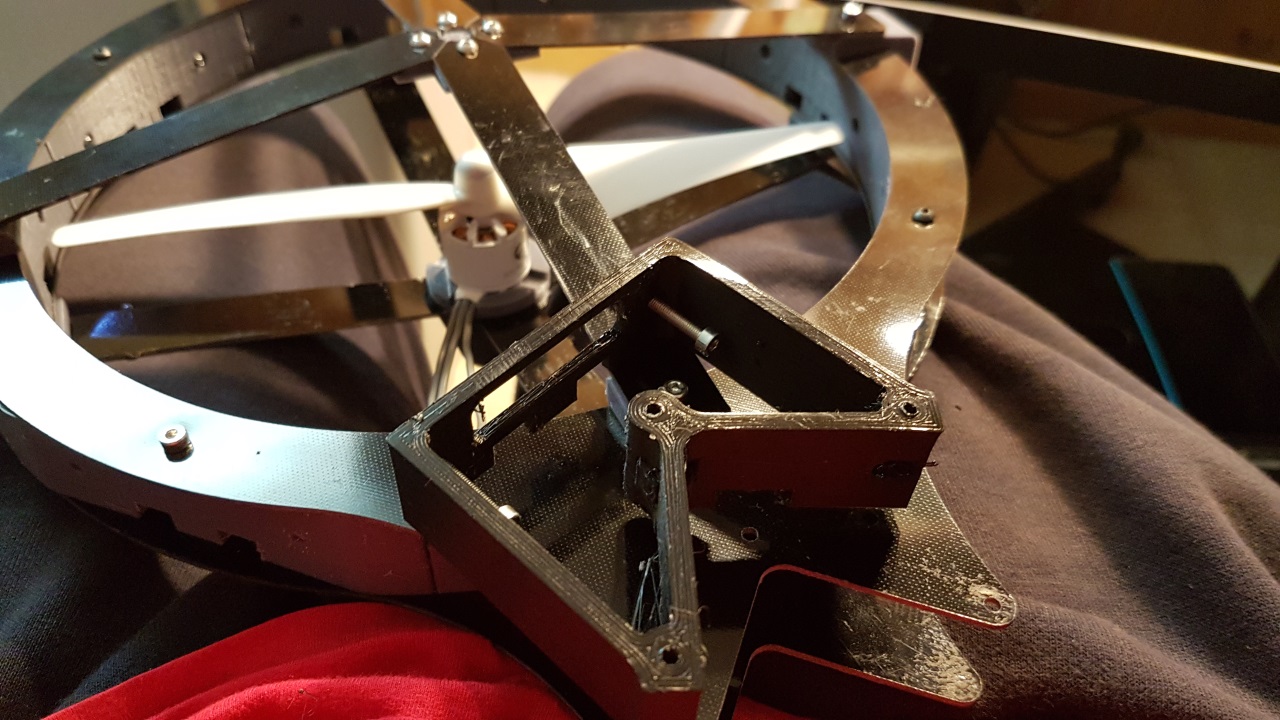
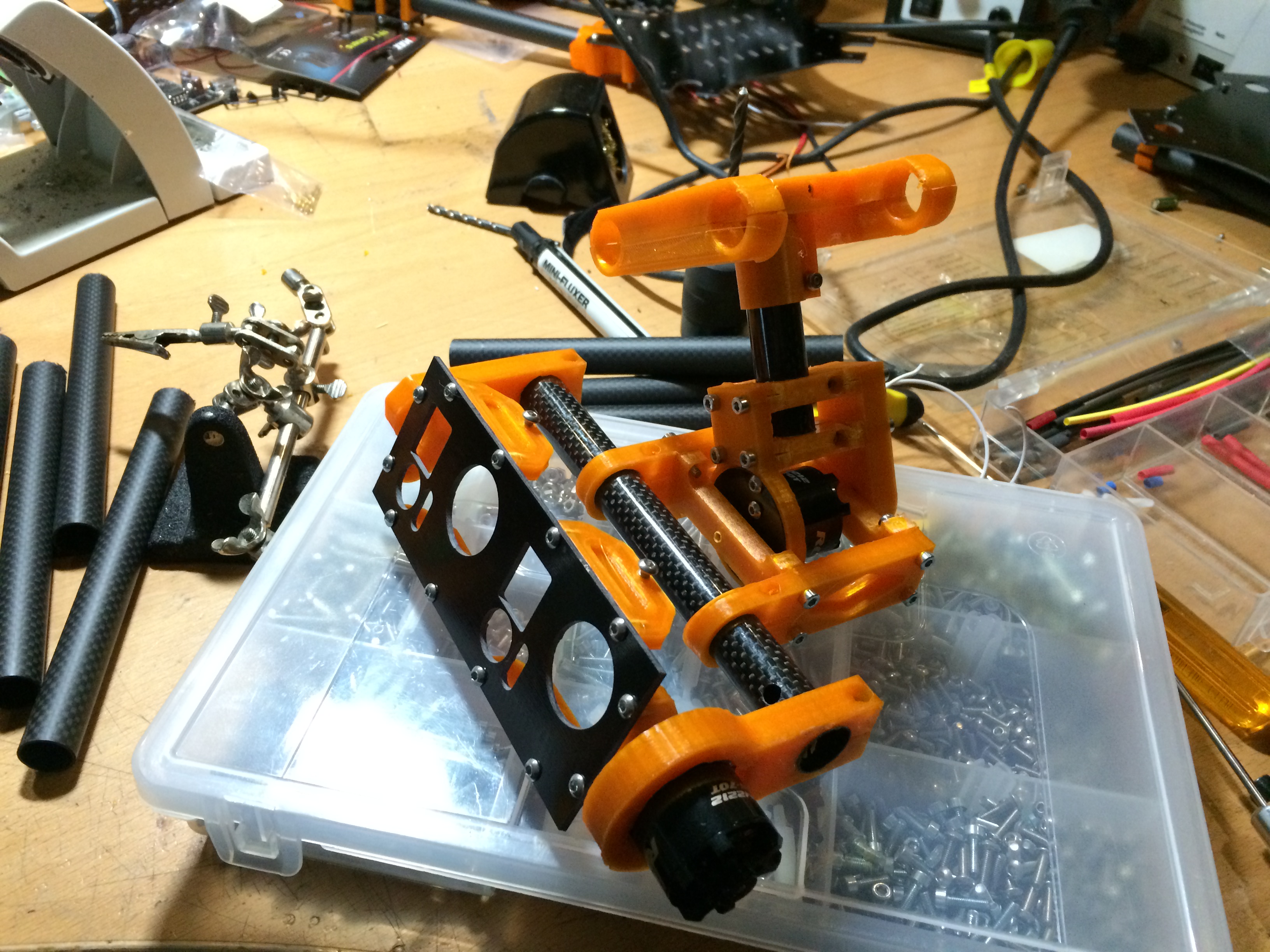
.. och sen var det legobygge.. Alla delar passade perfekt, men det blev en hel del skruvande..
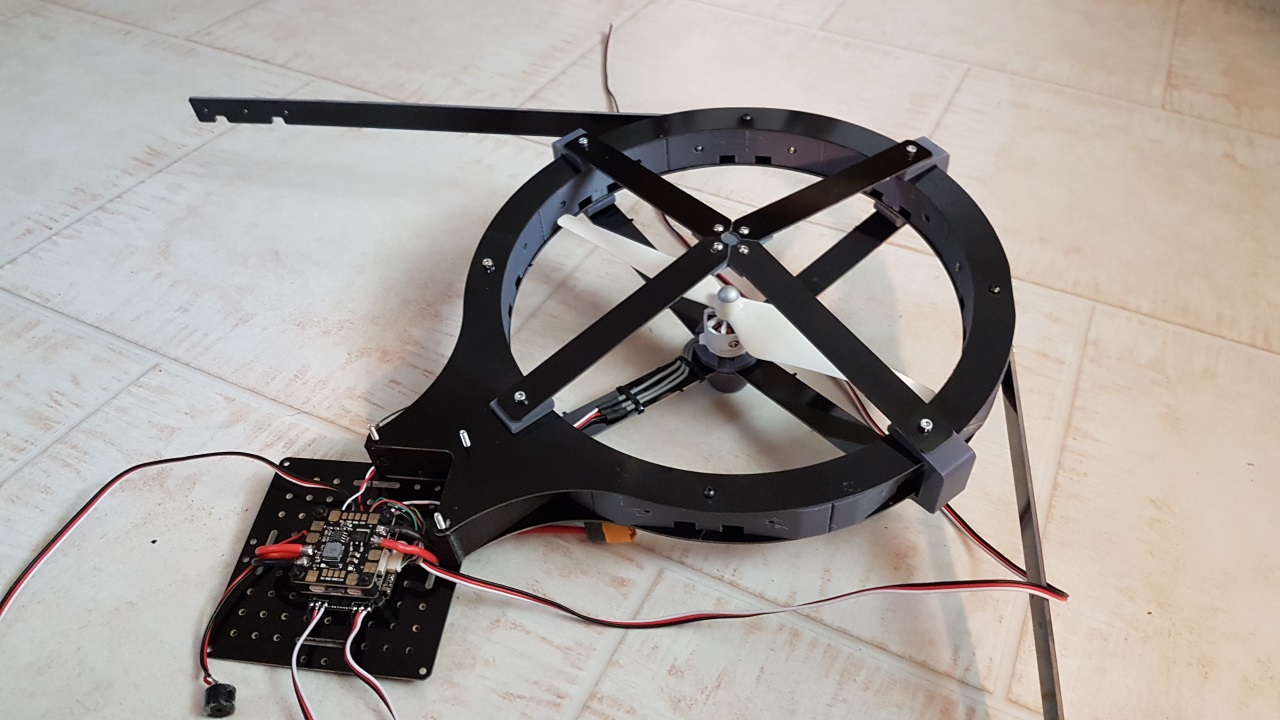


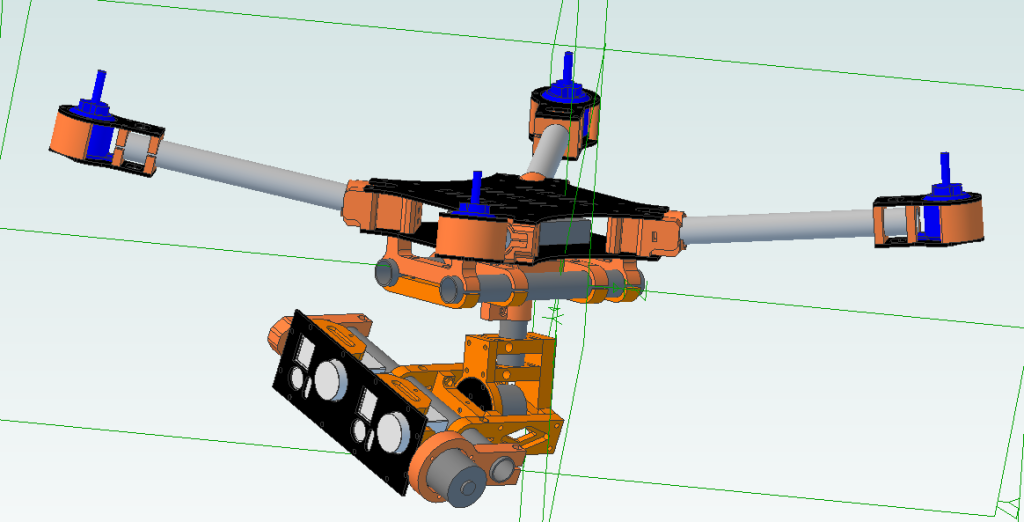
När maskinen satt ihop var det bara att programmera styrkortet, montera LED-ramper och testflyga..

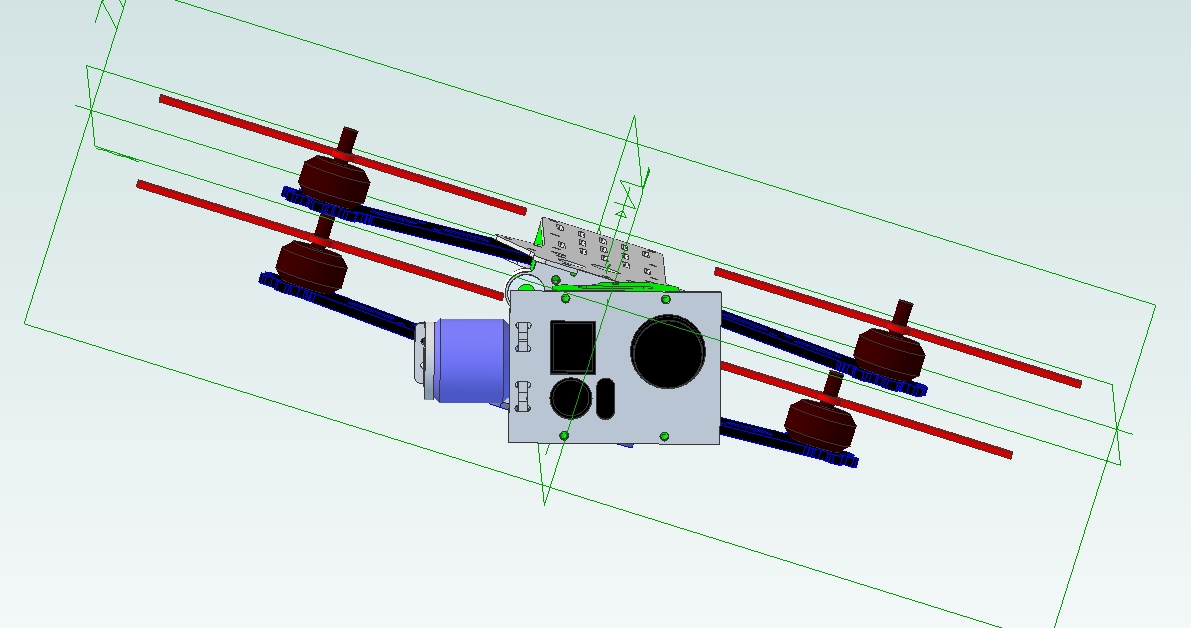
Maskinen vägde in på 2,2kg, vilket inte skulle vara något problem då jag läst att motorerna levererar 1,5kg thrust per styck, men när maskinen knappt lättade från marken på fullgas började jag kolla upp lite mer.. Det visar sig att dessa motorer levererar cirka 480g thrust per styck, och med dessa propellrar troligen ännu mindre.. Så hela kalaset var inte bättre än en – förvisso rätt cool – bortsfläkt.
Version 2
Vad göra? Eftersom att det börjar vara rätt brådis att få till en plattform att labba med, och det därför inte finns tid med motorbeställningar så är det vikt som ska jagas. Vägde alla utskrifter, och det är lite mer än 700g plast i maskinen, så nästa plan blev följande:

Eftersom att plasten egentligen inte har någon bärande funktion så fräste jag ut 25mm spacers i markisolering och använder 25mm aluspacers för att hålla stabiliteten i maskinen. På detta sätt fick vi ner vikten cirka 500g och maskinen tog till skyarna.. Tyvärr är den ändå för tung för att flyga så bra som vi vill – så det blev att göra en paniklösning!
Version 3mini
För att få till en plattform som är användbar fick jag ta till prylar jag hade hemma, så det blev en mindre variant:

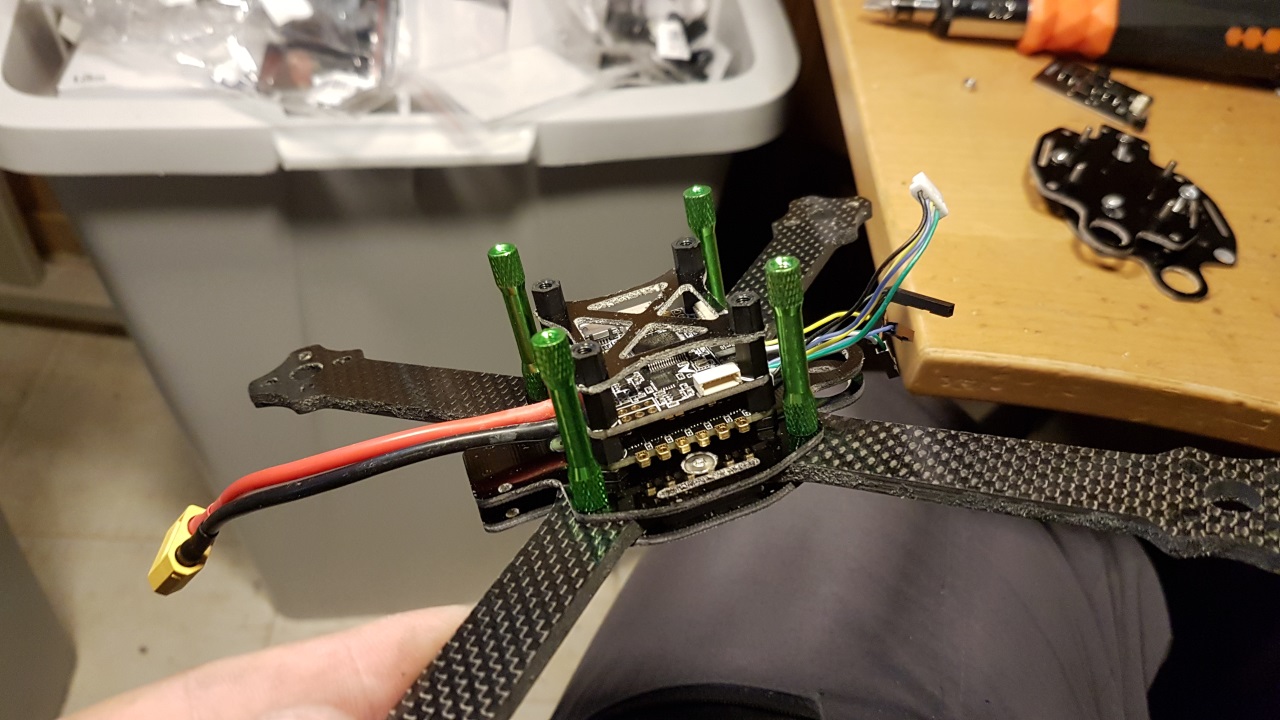
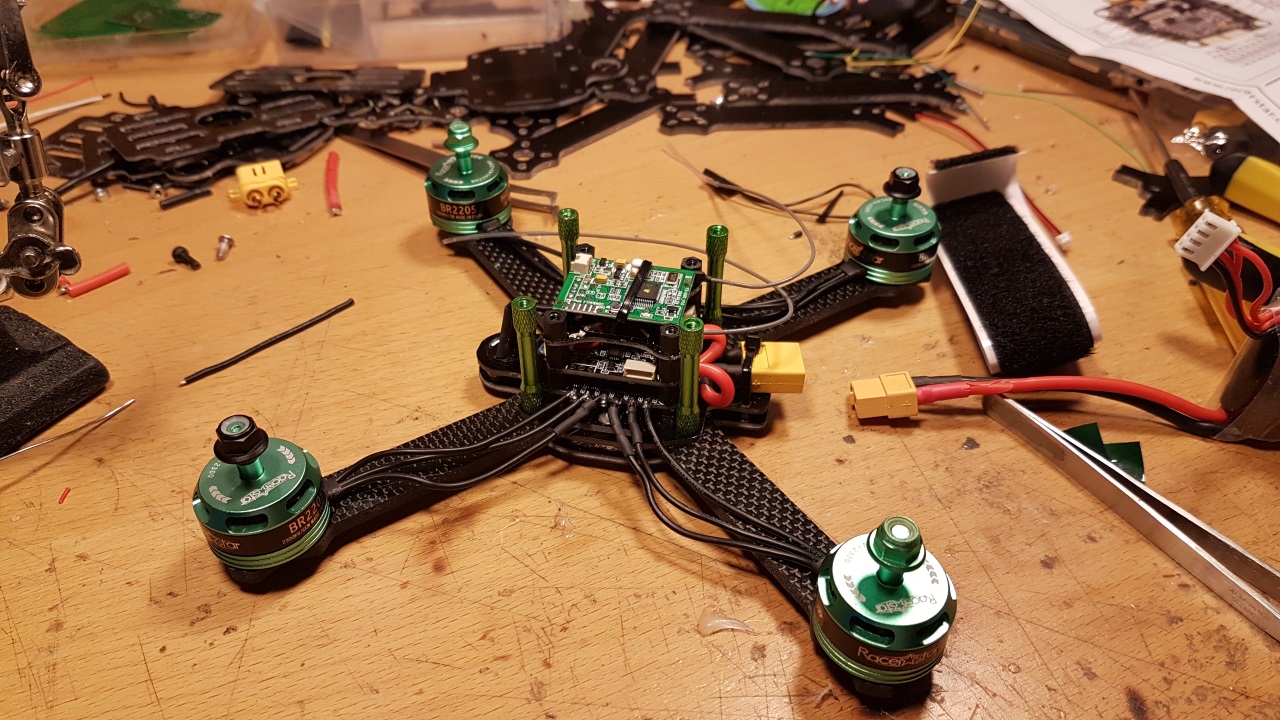
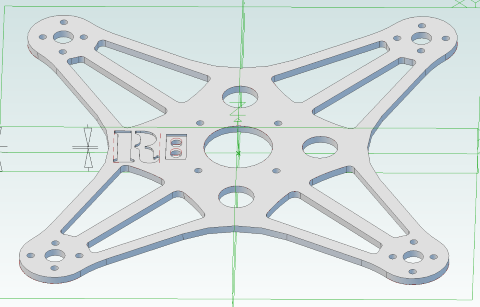
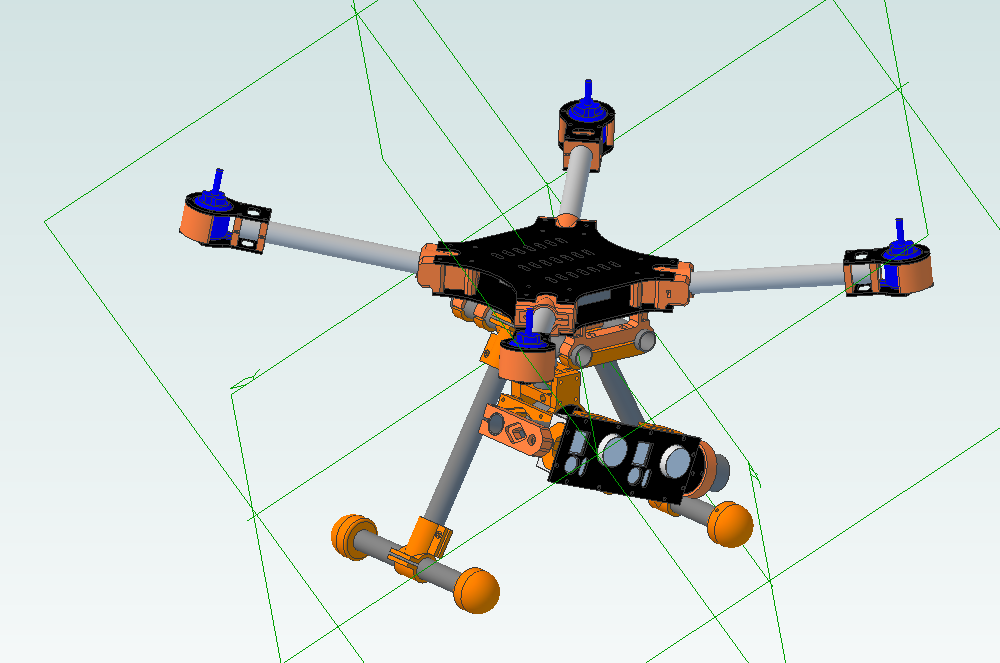
Dessa motorer har en max thrust på över kilot styck, men hela maskinen är betydligt mindre. 5″ propellrar istället för 9″. Men det fick även följden att jag kunde fräsa ut hela plattan i ett stycke, så konstruktionen blev mycket enklare.

Med en tomvikt på 418g flyger maskinen finfint! Kontroll-stacken är densamma som i den stora maskinen så ingenting behövde ställas om, bara ut och flyga:
15 minuter flygtid får man på ett batteri, vilket är tillräckligt för att kunna utföra de tester vi behöver.
Jag kommer att återuppta arbetet med version 1 när jag får tid till det, men när vi nu har en plattform så brinner det ju inte i knutarna så att säga..